Messen des Werkzeugs
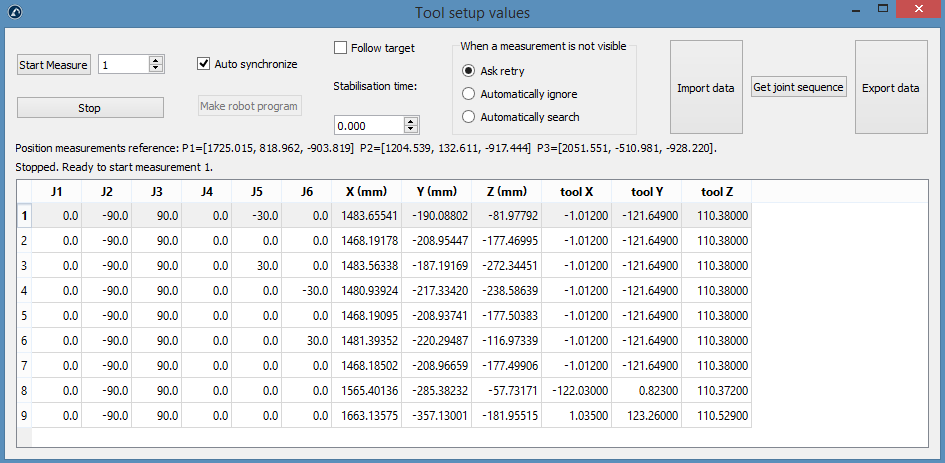
Die Messungen 1-6 können überall am Werkzeugflansch durchgeführt werden, solange Sie das gleiche Ziel für die 6 Messungen messen. Danach wird für jeden TCP, den Sie messen wollen, eine Messung für den gleichen TCP hinzugefügt. In diesem Fall haben Sie 3 TCPs, also 6 + 3 = 9 Messungen insgesamt. Sie können auf eine Messung doppelklicken, um von dieser Position aus zu messen.
Wie im vorherigen Abschnitt beschrieben: Wählen Sie im Bereich Werkzeugeinstellungen die Option Messen. Das folgende Fenster wird geöffnet. Wählen Sie Messung starten und der Roboter bewegt sich sequenziell durch die geplanten Messungen. Doppelklicken Sie auf eine Messung, um mit der Messung von dieser Position fortzufahren.
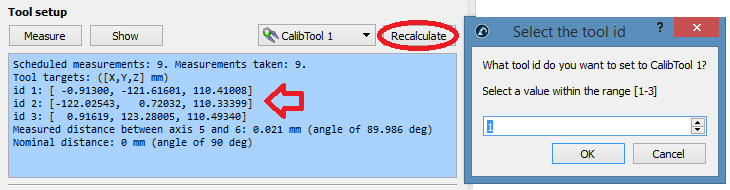
Die Zusammenfassung zeigt die kalibrierten TCPs, sobald der Vorgang abgeschlossen ist. Die Definition des TCP (im folgenden Bild "CalibTool 1") wird automatisch aktualisiert. Wenn Sie keinen TCP ausgewählt haben, können Sie einen neuen hinzufügen (wählen Sie Programm➔leeres Werkzeug hinzufügen) und wählen Sie erneut berechnen/rekalkulieren. Ein neues Fenster erscheint und Sie müssen die "ID" des Werkzeugs, abhängig von der Reihenfolge, in der Sie die Messungen durchgeführt haben, auswählen. Sie können dieselbe Prozedur wiederholen, um so viele TCPs wie nötig zu aktualisieren (in diesem Fall 3 TCPs). Die ID des Werkzeugs wird automatisch erkannt, sobald der Name des Werkzeugs mit einer Nummer endet.