Roboter Kalibrierung
Die Roboterkalibrierung ist in 4 Schritte unterteilt. Jeder Schritt erfordert eine Reihe von Messungen. Diese vier Schritte müssen der Reihe nach befolgt werden:
1.Messungen des Basisbezugssystem (3 Minuten).
2.Messungen des Werkzeugbezugssystem (3 Minuten)
3.Kalibrierungsmessungen (7 Minuten, 60 Messungen)
4.Validierungsmessungen (7 Minuten, 60 Messungen).
Das folgende Video zeigt, wie Sie diese Kalibrierung in 20 Minuten durchführen können: https://robodk.com/robot-calibration#tab-lt. Die Validierungsmessungen (Schritt 4) sind nicht zwingend notwendig, um den Roboter zu kalibrieren. Sie liefern jedoch einen objektiven Anhaltspunkt der Genauigkeit der Ergebnisse. Es ist auch möglich, die Auswirkungen der Kalibrierung des Roboters in einem Bereich und der Validierung in einem anderen Bereich zu sehen.
Wählen Sie für jeden der vier Messreihen die Schaltfläche Messen. Dies öffnet ein neues Fenster, das neue Messungen ermöglicht sowie vorhandene Messungen in einer Textdatei (CSV- oder TXT-Format) importiert und exportiert).
Measuring the base
Diese Messungen können überall im Werkzeugflansch durchgeführt werden, wenn das gleiche Ziel für alle 6 Messungen gemessen wird. Um die Messungen zu starten, wählen Sie Messen im Abschnitt Grundeinstellungen. Das folgende Fenster wird geöffnet. Wählen Sie dann Messung starten und der Roboter bewegt sich sequenziell durch die geplanten Messungen.
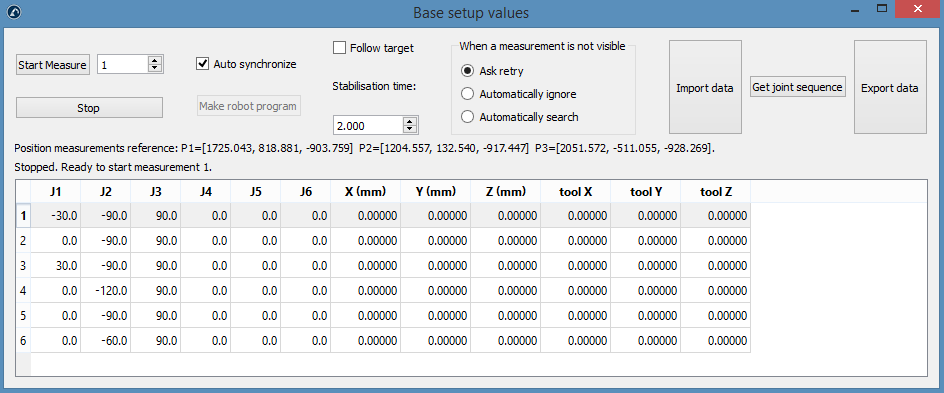
Schließen Sie das Fenster, wenn die Messungen abgeschlossen sind, und das Bezugssystem der Messungen wird in Bezug auf die Roboterbasis aktualisiert. Wenn Sie kein Bezugssystem ausgewählt haben, können Sie eines hinzufügen (wählen Sie Programm➔Bezugssystem hinzufügen) und platzieren Sie dieses unter dem Roboterbasis Bezugssystem (Drag & Drop im Objektbaum).
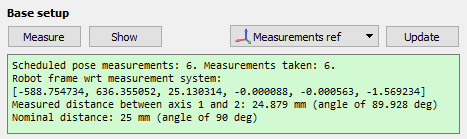
Die Zusammenfassung zeigt die Position und Orientierung oder das Bezugssystem des Roboters in Bezug auf das Bezugssystem der Kalibrierung ([x,y,z,w,p,r] Format in mm und Bogenmaß)
Messen des Werkzeugs
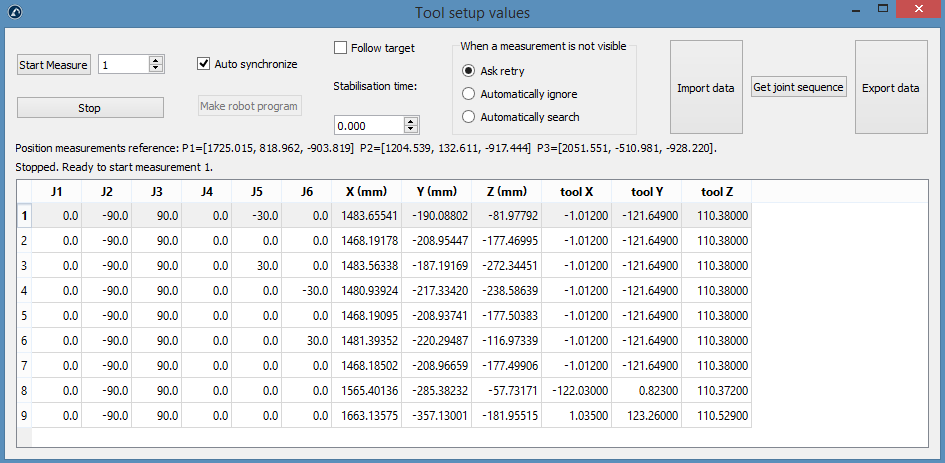
Die Messungen 1-6 können überall am Werkzeugflansch durchgeführt werden, solange Sie das gleiche Ziel für die 6 Messungen messen. Danach wird für jeden TCP, den Sie messen wollen, eine Messung für den gleichen TCP hinzugefügt. In diesem Fall haben Sie 3 TCPs, also 6 + 3 = 9 Messungen insgesamt. Sie können auf eine Messung doppelklicken, um von dieser Position aus zu messen.
Wie im vorherigen Abschnitt beschrieben: Wählen Sie im Bereich Werkzeugeinstellungen die Option Messen. Das folgende Fenster wird geöffnet. Wählen Sie Messung starten und der Roboter bewegt sich sequenziell durch die geplanten Messungen. Doppelklicken Sie auf eine Messung, um mit der Messung von dieser Position fortzufahren.
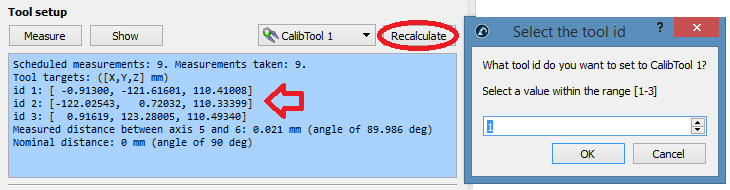
Die Zusammenfassung zeigt die kalibrierten TCPs, sobald der Vorgang abgeschlossen ist. Die Definition des TCP (im folgenden Bild "CalibTool 1") wird automatisch aktualisiert. Wenn Sie keinen TCP ausgewählt haben, können Sie einen neuen hinzufügen (wählen Sie Programm➔leeres Werkzeug hinzufügen) und wählen Sie erneut berechnen/rekalkulieren. Ein neues Fenster erscheint und Sie müssen die "ID" des Werkzeugs, abhängig von der Reihenfolge, in der Sie die Messungen durchgeführt haben, auswählen. Sie können dieselbe Prozedur wiederholen, um so viele TCPs wie nötig zu aktualisieren (in diesem Fall 3 TCPs). Die ID des Werkzeugs wird automatisch erkannt, sobald der Name des Werkzeugs mit einer Nummer endet.
Kalibrierung
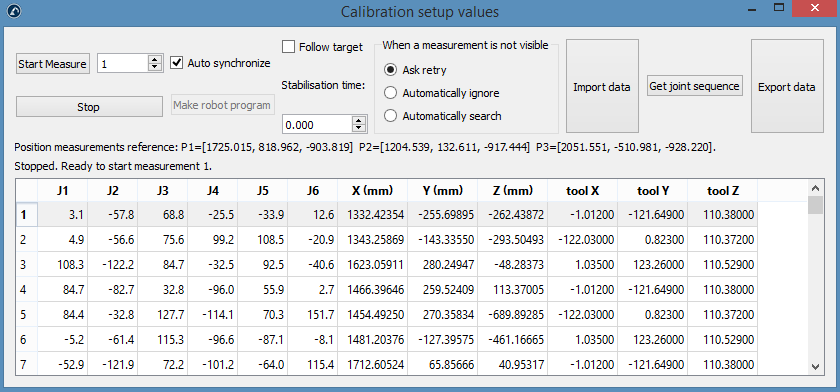
Wählen Sie im Bereich Kalibrierung die Option Messen. Das folgende Fenster wird geöffnet. Wählen Sie dann Messung starten und der Roboter bewegt sich sequenziell durch die geplanten Messungen. Doppelklicken Sie auf eine Messung, um mit der Messung von dieser Position fortzufahren.
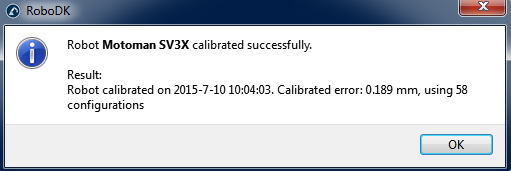
Schließen Sie das Fenster, sobald die Messungen abgeschlossen sind. Der Roboter wird automatisch kalibriert und es wird die folgende Meldung angezeigt, wenn keine Probleme auftreten.
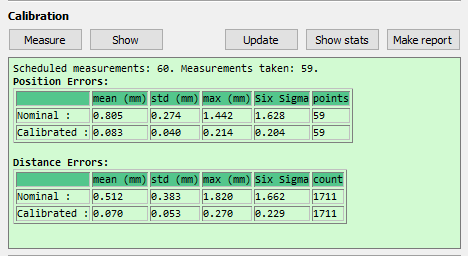
Schließlich zeigt der grüne Bildschirm diverse Statistiken bezüglich der Kalibrierungsmessungen an. Zudem wird ausgegeben wie sich die Genauigkeit für diese Messungen verbessert wird.
Validierung
Sie sollten die Genauigkeit des Roboters nicht mit den gleichen Messungen validieren, mit denen Sie den Roboter kalibriert haben. Daher wird empfohlen, zusätzliche Messungen zu machen, um die Genauigkeit zu validieren.
Das gleiche Kalibrierungsverfahren muss verwendet werden, um die Validierungsmessungen durchzuführen. Die Zusammenfassung zeigt die Validierungsstatistiken an. Weitere Informationen finden Sie im Abschnitt Ergebnisse.