Roboter Kalibrierungs Setup
Es ist erforderlich, den Lasertracker und den Roboter mit dem Computer zu verbinden, um die Durchführung von Messungen zu automatisieren. Es wird ebenfalls empfohlen, ein Bezugssystem über drei Punkte zu messen, falls Sie den Laser Tracker bewegen (dieser Schritt ist zwingend durchzuführen, wenn Sie die Ausgangsposition für Achse 1 wiederherstellen möchten, siehe Anhang II für weitere Informationen).
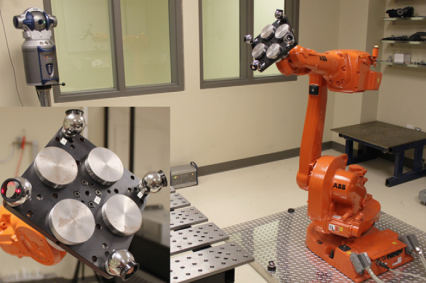
Es ist erforderlich, mindestens ein SMR-Ziel anzubringen (drei oder mehr werden empfohlen), wie in den folgenden Bildern gezeigt. Es ist auch praktisch, 3 Ziele als Bezugssystem zu verwenden, wenn der Lasertracker bewegt werden muss.
Die folgenden Unterabschnitte müssen nacheinander ausgeführt werden. Dies ermöglicht es Messungen zu starten.
Mit dem Tracker verbinden
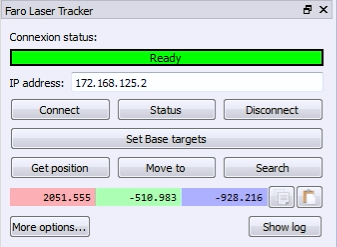
Die IP des Laser Tracker wird benötigt, um die Kommunikation mit RoboDK herzustellen. Befolgen Sie diese Schritte, um die Kommunikation mit dem Lasertracker zu überprüfen:
a.Wählen Sie das Menü «Verbinden➔Lasertracker verbinden». Ein neues Fenster sollte sich öffnen.
b.Stellen Sie die IP des Laser Tracker ein.
c.Klicken Sie auf die Schaltfläche "Verbinden".
Wenn die Verbindung erfolgreich ist, sollten Sie eine grüne Nachricht sehen, die "Bereit" anzeigt. Das Fenster kann geschlossen werden und die Verbindung bleibt aktiv.
Verbindung mit dem Roboter
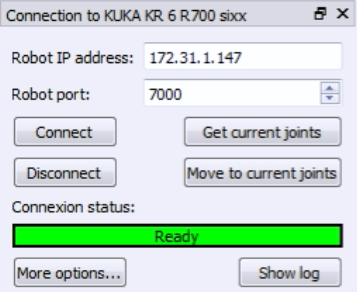
Die IP des Roboters (oder die COM-Port-Nummer für RS232-Verbindungen) wird benötigt, um die Kommunikation mit RoboDK richtig einzustellen. Befolgen Sie diese Schritte, um die Kommunikation mit dem Roboter zu überprüfen:
1.Wählen Sie Verbinden➔Roboter verbinden. Ein neues Fenster wird erscheinen.
2.Stellen Sie die IP und den Port des Roboters ein (oder den COM-Port, wenn die Verbindung über RS232 erfolgt).
3.Klicken Sie auf die Schaltfläche Verbinden.
4.Falls irgendwelche Probleme auftreten, lesen Sie den Anhang.
Wenn die Verbindung erfolgreich ist, sollten Sie eine grüne Nachricht sehen, die Bereit anzeigt. Die Position des virtuellen Roboters sollte exakt mit der Position des realen Roboters übereinstimmen, wenn Sie die aktuellen Achswinkel auslesen. Wählen Sie alternativ zur aktuellen Position bewegen, um den Roboter an die aktuelle Position im Simulator zu bewegen. Das Fenster kann geschlossen werden und die Verbindung bleibt aktiv
Messen der Referenzziele
Es wird empfohlen, ein Kalibrierungsbezugssystem zu messen, das an die Roboterbasis angebracht ist. Dies ist hilfreich, wenn Sie den Tracker während der Kalibrierung verschieben oder zwei Roboterkalibrierungen vergleichen möchten. Dieser muss durch 3 erreichbare Punkte definiert werden.
Sie können diesen Schritt überspringen, wenn Sie den Tracker nicht in Bezug auf den Roboter bewegen oder die Ausgangsposition für Achse 1 nicht wiederherstellen müssen. In diesem Fall wird das Bezugssystem des Lasertrackers verwendet.
Sie sollten diese Schritte jedes Mal befolgen, wenn der Laser Tracker bewegt wird:
1.Wählen Sie Verbinden➔Laser Tracker verbinden.
2.Stellen Sie die IP des Laser Trackers ein und wählen Sie verbinden (wenn der Laser Tracker nicht angeschlossen ist).
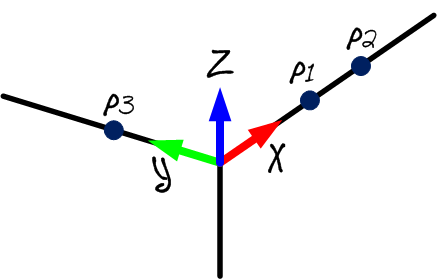
3.Stellen Sie das Kalibrierungsbezugssystem und das Tracker Bezugssystem wie im Bild gezeigt ein. Das Kalibrierungsbezugssystem wird auch als Maßbezugssystem bezeichnet.
4.Wählen Sie Basisziele festlegen.
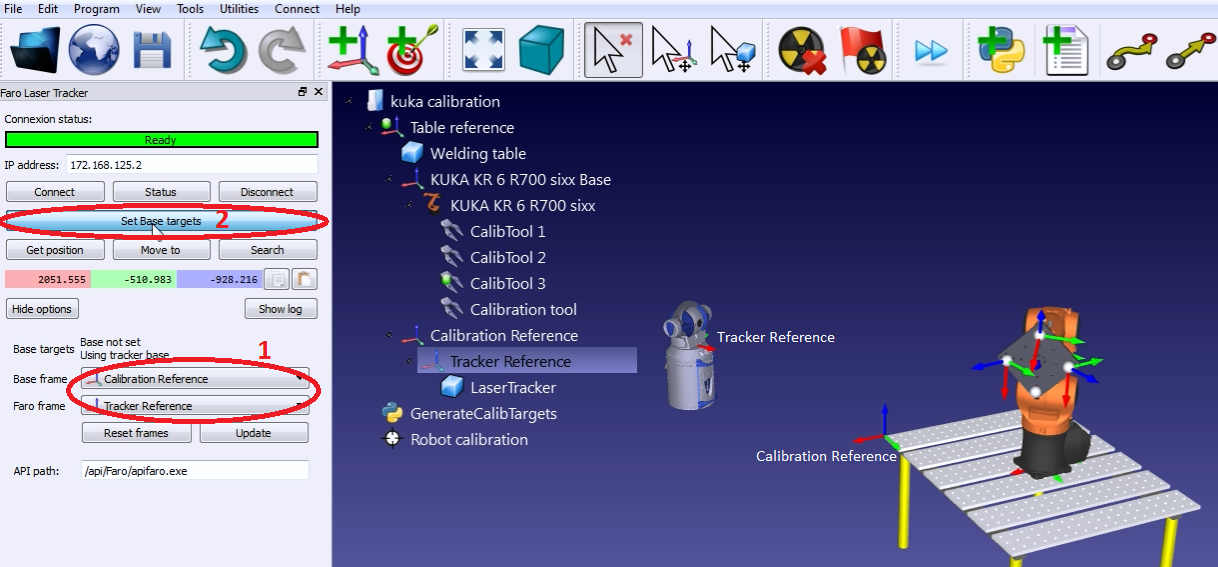
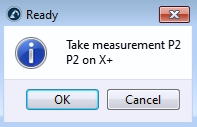
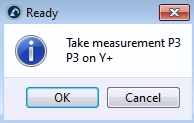
RoboDK führt den Benutzer durch die Menüs, die im nächsten Bild gezeigt werden. Die Position des Lasertrackers wird automatisch aktualisiert, sobald der Vorgang abgeschlossen ist.