Robotertreiber bearbeiten
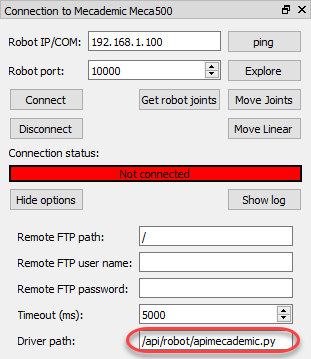
Robotertreiber befinden sich standardmäßig im Ordner /RoboDK/api/Robot/. RobodDK verbindet sich mit einem bestimmten Treiber in den Roboter-Verbindungseinstellungen:
1.Klicken Sie mit der rechten Maustaste auf einen Roboter
2.Wählen Sie 
3.Wählen Sie Weitere Optionen…
4.Suchen oder geben Sie den Pfad des Treibers im Abschnitt Treiberpfad ein
Ein Robotertreiber ist eine eigenständige Konsolenanwendung. Robotertreiber können unter Verwendung einer beliebigen Programmierplattform entwickelt werden, zum Beispiel können sie ein Python-Modul (PY-Format) oder irgendwelche ausführbaren Programme sein, die mit einer beliebigen IDE erstellt werden.
Der Robotertreiber ermöglicht die Kommunikation mit einem Roboter über die Kommandozeile. Die gleichen Befehle, die manuell ausgeführt werden können, werden auch von RoboDK verwendet, um den Roboter vom PC aus zu steuern. Jeder Robotertreiber kann im Konsolenmodus ausgeführt werden, um ihn zu testen.
Ein Beispiel-Python-Treiber (apimecademic.py) mit seinem Quellcode zur Steuerung von Mecademic-Robotern ist unter C:/RoboDK/bin/robot/ verfügbar.
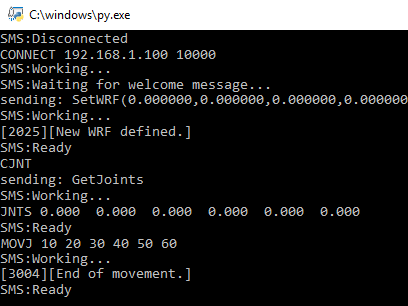
Doppelklicken Sie auf die Datei apimecademic.py, um das Modul im Konsolenmodus auszuführen (Python muss installiert sein). Der Treiber wird auf neue Befehle warten. Zum Beispiel können wir den folgenden Befehl eingeben, um eine Verbindung zu dem Roboter herzustellen, der eine IP und einen Kommunikationsport bereitstellt:
CONNECT 192.168.100.1 10000
Wenn die Verbindung erfolgreich ist, sollten Sie eine SMS:Ready Nachricht sehen. Anschließend können Sie den folgenden Befehl eingeben, um die aktuellen Achswinkel abzurufen:
CJNT
Sie können auch andere Befehle wie MOVJ, MOVL oder SETTOOL verwenden um den Roboter oder den TCP zu aktualisieren:
MOVJ 10 20 30 40 50 60
Einige Roboter unterstützen die Überwachung der Achswinkel in Echtzeit. In diesem Fall ist es möglich, eine Rückmeldung über diese zu liefern, sobald sich der Roboter bewegt, indem der Befehl JNTS_MOVING verwendet wird. Wenn der Treiber von RoboDK aus gesteuert wird, folgt der virtuelle Roboter der Bewegung des realen Roboters in Echtzeit. Ein neuer Befehl wird erst verarbeitet, wenn die Ready-Nachricht gesendet wird.
Die Interaktion mit der Konsole und die Verbindung zum Roboter werden von dem einen Python-Modul für den Mecademic-Treiber verwaltet. Die Interaktion mit der Konsole sollte für alle Roboter gleich sein, wie in diesem Abschnitt beschrieben. Die Interaktion mit jedem Roboter hängt jedoch vom Roboterhersteller ab. In diesem Fall haben wir das Programmier Handbuch Meca 500 verwendet, um die entsprechenden Befehle zum Bewegen und Überwachen des Roboters Meca 500 zu verwenden.