Verwenden des API
Es ist möglich, die Bewegung eines Roboters über die RoboDK API zu steuern, beispielsweise um einen Roboter aus einem Python-Programm oder einer C # -Anwendung zu programmieren.
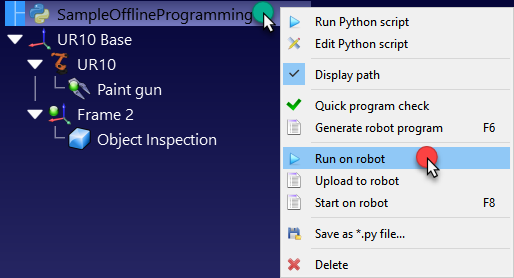
Die Option Auf Roboter ausführen wird automatisch verwaltet, wenn ein Python-Programm von RoboDK ausgeführt wird. Befolgen Sie diese Schritte, um ein Python-Programm auf dem Roboter auszuführen:
1.Rechsklicken Sie auf ein 
2.Wählen Sie 
Das Programm sollte auf dem Roboter laufen und der Roboterverbindungsstatus wird entsprechend aktualisiert.
Wenn das Programm außerhalb der RoboDK-GUI ausgeführt wird (zu Debugzwecken oder wenn beispielsweise die RoboDK-API für C# verwendet wird), können Sie den RunMode mit RDK.setRunMode auf RUNMODE_RUN_ROBOT setzen. Dies zwingt das Programm zur Ausführung auf dem Roboter. Es ist auch möglich, die Verbindung mit robot.Connect() herzustellen.
Der folgende Code zeigt ein kurzes Beispiel, um direkt aus der API eine Verbindung mit dem Roboter herzustellen:
# Start the RoboDK API
RDK = Robolink()
robot = RDK.Item('',ITEM_TYPE_ROBOT)
# Connect to the robot using default connetion parameters
success = robot.Connect()
status, status_msg = robot.ConnectedState()
if status != ROBOTCOM_READY:
# Stop if the connection did not succeed
raise Exception("Failed to connect: " + status_msg)
# Set to run the robot commands on the robot
RDK.setRunMode(RUNMODE_RUN_ROBOT)
# Note: This is set automatically if we use
# robot.Connect() through the API
# Move the robot:
robot.MoveJ([10,20,30,40,50,60])
prog = RDK.Item('MainProgram', ITEM_TYPE_PROGRAM)
prog.setRunType(PROGRAM_RUN_ON_ROBOT) # Set the run on robot option
# Set to PROGRAM_RUN_ON_SIMULATOR to run on the simulator only
prog.RunProgram()
while prog.Busy() == 1:
pause(0.1)
print("Program done")