Kurvenverfolgungsprojekt
Mit RoboDK kann ein Roboter Kurven im 3D-Raum abfahren. Kurven in RoboDK können aus Objektkanten ausgewählt oder als Liste von Punkten in CSV-Dateien importiertwerden. Diese Option ist beispielsweise für Roboterschweißanwendungen nützlich.
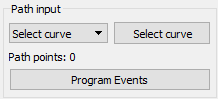
Wählen Sie Dienstprogramme➔Kurvenverfolgung Projekt, um die Einstellungen für die Kurvenverfolgung zu öffnen. Diese Einstellungen sind mit denen eines Roboter Bearbeitungsprojekts identisch. Der einzige Unterschied besteht darin, dass die Pfadeingabe auf Kurve auswählen eingestellt ist.
Wählen Sie Kurve auswählen, um die Kurve(n) auf dem Bildschirm auszuwählen.
Wählen Sie die Kurven mit der linken Maustaste aus. Durch zweimaliges Auswählen derselben Kurve wird die Bewegungsrichtung umgeschaltet. Wenn Sie mit der rechten Maustaste auf eine zuvor ausgewählte Kurve klicken, können Sie auch die Richtung wechseln oder eine zuvor ausgewählte Kurve abwählen
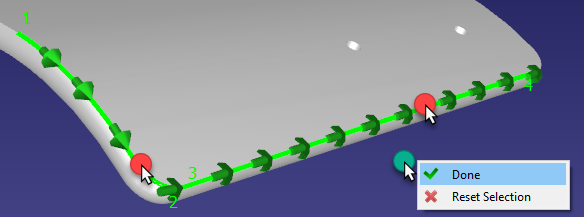
Klicken Sie mit der rechten Maustaste auf den Bildschirm und wählen Sie Fertig oder drücken Sie die Esc-Taste, um zum Einstellungsmenü zurückzukehren. Der grüne Pfad zeigt die Roboterbewegung in Bezug auf das Objekt an.
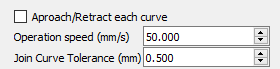
Einige zusätzliche Optionen sind oben rechts in den Einstellungen verfügbar, z. B. die Werkzeuggeschwindigkeit und ob die Anfahrts-/Rückzugsbewegungen für jede Kurve angewendet werden müssen. Die Standardeinstellungen werden im nächsten Bild angezeigt:
Kurven importieren
Kurven können in RoboDK aus einer CSV-Datei oder einer Textdatei importiert werden, indem Sie Dienstprogramme➔Kurven importieren auswählen. In der Station wird ein neuer Gegenstand angezeigt, der die Kurve als Objekt anzeigt.
Die verwendete Datei kann eine Textdatei mit den 3D-Koordinaten jedes Punktes der Kurve sein. Optional kann die Orientierung der Z-Achse des Werkzeugs als ein i, j, k-Vektor bereitgestellt werden.
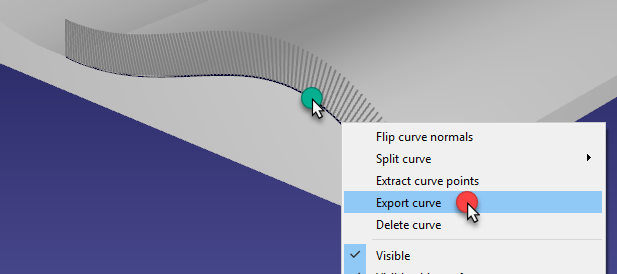
Optional können bestehende Kurven eines Objekts als CSV-Datei exportiert werden (Rechtsklick auf eine Kurve, dann Kurve exportieren), modifiziert und wieder in RoboDK importiert werden.