Parameteroptimierung
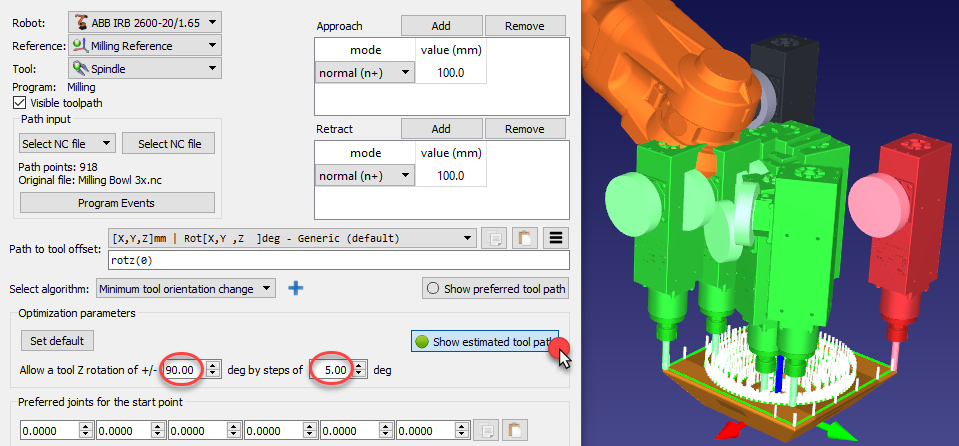
Bei einer bevorzugten Ausrichtung kann der Roboter eine gewisse Restfreiheit haben, innerhalb welcher er um die Z-Achse des Werkzeugs drehen kann. Dies ermöglicht es dem Roboter, das Programm auszuführen, wobei Robotersingularitäten und Achsenbeschränkungen vermieden werden. Standardmäßig lässt RoboDK das Werkzeug um bis zu +/- 180 Grad um die TCP-Achse in Schritten von 20 Grad rotieren.
Es wird empfohlen, diese Drehung abhängig von der Anwendung zu beschränken. Zum Beispiel ist es möglich, +/- 90 Grad einzugeben, um die zulässige Drehung um die Hälfte zu beschränken.
Wenn einige Punkte des Pfades nicht erreichbar sind, empfiehlt es sich, das Bezugssystem zu verschieben oder mit der Z-Drehung des Werkzeugs toleranter zu sein. Das Bezugssystem kann mit der Alt-Taste bewegt werden.