Roboter 3D Druck Projekt
Der 3D-Druck oder die additive Fertigung ist der Herstellungsprozess dreidimensionaler fester Objekte aus einer digitalen Datei. Industrieroboterarme können hierzu als 3-Achs-3D-Drucker oder als 5-Achs-3D-Drucker mit RoboDK verwendet werden. Das folgende Video zeigt eine Übersicht über das Einrichten des 3D-Drucks mit RoboDK offline: Video anschauen.
3D-Druck mit Robotern ist auf eine der folgenden Arten möglich:
●Konvertieren Sie G-Code-Programme (NC-Datei) direkt in Roboterprogramme mit Hilfe von RoboDK. Dies wurde im Projekt Roboter maschinelle Bearbeitung gezeigt. Die Materialflussrate (Extruder-Anweisung E) wird bei jeder Bewegung richtig berücksichtigt und kann als Programm Ereignis in das generierte Programm integriert werden. G-Code ist eine Art von NC-Datei, die von RoboDK unterstützt wird und auch von vielen 3D-Druckern unterstützt wird. Die meisten Slicer Programme können ebenfalls G-Code mit einer STL-Datei erzeugen.
●Wählen Sie Dienstprogramme➔3D Projekt drucken, um die 3D-Druckeinstellungen zu öffnen. Diese Einstellungen sind mit denen eines Roboter maschinelle Bearbeitungidentisch. Der einzige Unterschied besteht darin, dass die Pfad Eingabe als 3D-Druckobjekt voreingestellt ist. Wählen Sie Objekt auswählen, um das Objekt auf dem Hauptbildschirm auszuwählen und automatisch den Werkzeugweg zu erhalten. Wählen Sie 3D-Druckoptionen, um Slic3r zu öffnen.
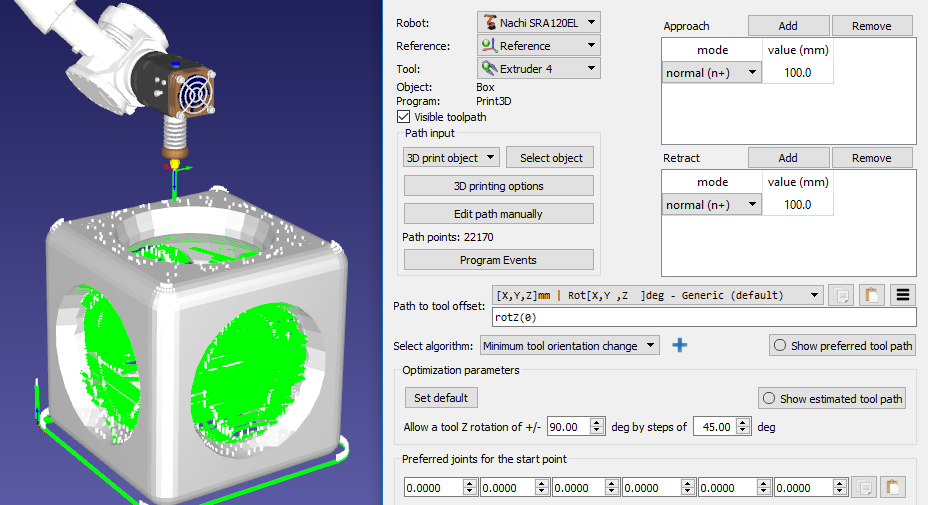
Standardmäßig übersetzt RoboDK die E-Direktive als Programmaufruf in ein Programm namens Extruder und übergibt den E-Wert als Parameter. Wählen Sie Programm-Ereignisse, um dieses Verhalten zu ändern.
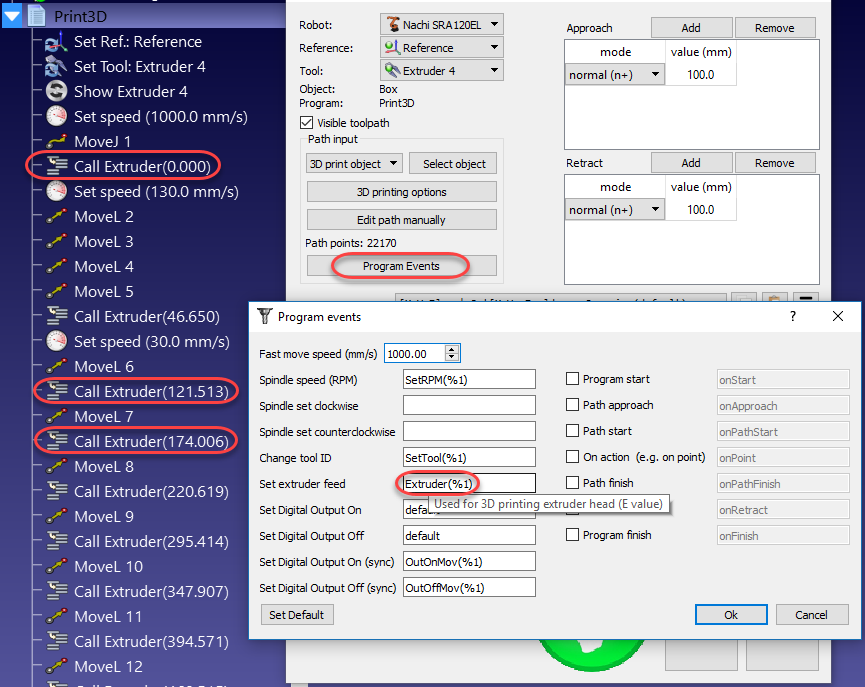
Der Extruder-Wert (E) gibt an, wie viel Material vor jeder Bewegung extrudiert werden muss. Dieser Wert kann verwendet werden, um die Extruderzufuhr vom Roboter, abhängig von Robotergeschwindigkeit und Abstand der Punkte, zu steuern.
Alternativ ist es möglich, die Beschickung des Extruders mit einem Postprozessor zu berechnen und entsprechend Code zu generieren. Der folgende Abschnitt enthält ein Beispiel.
Postprozessoren für Roboter 3D Druck
Dieser Abschnitt beschreibt, wie ein Roboter Postprozessorbearbeitet werden muss, um die Zufuhr des Extruders, vor der jeweiligen Bewegung, zu berechnen. Alternativ können diese Berechnungen auch auf dem Roboter Controller gemacht werden.
Der erste Schritt besteht darin, die Extruder-Aufrufe abzufangen und die neuen Extruder-Werte (E-Werte) aus dem RunCode-Abschnitt im Postprozessor zu lesen:
def RunCode(self, code, is_function_call = False):
if is_function_call:
if code.startswith("Extruder("):
# Intercept the extruder command.
# if the program call is Extruder(123.56)
# we extract the number as a string
# and convert it to a number
self.NEW_E_LENGTH = float(code[9:-1])
# Skip the program call generation
return
else:
self.addline(code + "()")
else:
# Output program code
self.addline(code)
Der Extruder-Wert wird als NEW_E_LENGTH-Variable gespeichert. Anschließend muss man ein neues Verfahren definieren, das Extruder-Vorschubbefehle entsprechend dem Abstand zwischen den Bewegungen, der Robotergeschwindigkeit und der Roboterbeschleunigung erzeugt. Dies setzt voraus, dass die Extruderzufuhr durch eine spezifische analoge Ausgabe von der Robotersteuerung (in diesem Beispiel den analogen Ausgang Nummer 5) angetrieben wird
def new_move(self, pose1, pose2):
if pose1 isNone:
return
def Calculate_Time(Dist, Vmax, Amax):
'''Calculate the time to move Dist with Amax acceleration and Vmax speed'''
tacc = Vmax/Amax;
Xacc = 0.5*Amax*tacc*tacc;
if Dist <= 2*Xacc:
# Vmax is not reached
tacc = sqrt(Dist/Amax)
Ttot = tacc*2
else:
# Vmax is reached
Xvmax = Dist - 2*Xacc
Tvmax = Xvmax/Vmax
Ttot = 2*tacc + Tvmax
return Ttot
add_material = self.NEW_E_LENGTH - self.LAST_E_LENGTH
self.LAST_E_LENGTH = self.NEW_E_LENGTH
if add_material > 0:
distance_mm = norm(subs3(pose1.Pos(), pose2.Pos()))
# calculate movement time in seconds
time_s = Calculate_Time(distance_mm, self.SPEED_MMS, self.ACCEL_MMSS)
# add material
self.setDO(5, (add_material/time_s))
else:
# DO not add material
self.setDO(5,0)
Schließlich müssen wir den Befehl new_move mit jeder neuen Bewegungsinstruktion ausführen. Wir können diesen Aufruf am Anfang des MoveL-Befehls hinzufügen:
def MoveL(self, pose, joints, conf_RLF=None):
"""Add a linear movement"""
self.new_move(self.LAST_POSE, pose) # used for 3D printing