I/O festlegen oder auf I/O warten
Wählen Sie Programm➔
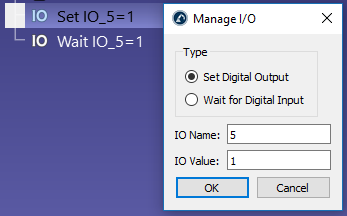
Der I/O Name kann eine Zahl oder ein Text sein, wenn es sich um eine benannte Variable handelt. Der I/O Wert kann eine Zahl (0 für Falsch und 1 für Wahr) oder ein Text sein, wenn es sich um einen benannten Status handelt.
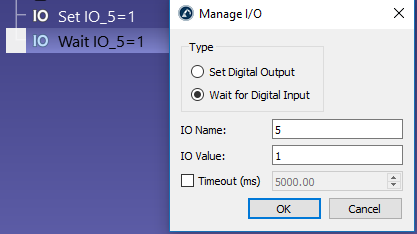
Mit Warten auf eine digitale Eingabe wird die Programmausführung angehalten, bis sich ein bestimmter Eingang auf einen bestimmten Wert ändert. Darüber hinaus unterstützen die meisten Robotersteuerungen eine Timeout-Verzögerung. Diese verursacht einen Fehler, wenn die Wartezeit einen bestimmten Wert überschreitet. Aktivieren Sie die Option Timeout (ms), um diese Funktion zu aktivieren.
Wenn Sie simulierte digitale Eingänge und digitale Ausgänge ändern, werden neue Stationsvariablen erstellt. Um den Status dieser Variablen zu überprüfen, können Sie mit der rechten Maustaste auf die Station klicken und Stationsparameter auswählen. Ebenfalls ist es möglich, diese Variablen über die API zu lesen oder zu ändern.