Linearbewegung
Wählen Sie Programm➔
Wenn vor dem Hinzufügen der Anweisung kein Ziel ausgewählt wird, erstellt die Bewegungsanweisung ein neues Ziel. Wenn das Ziel bewegt wird, wird auch die Bewegung geändert.
PTP Bewegungen und lineare Bewegungen verhalten sich auf die gleiche Weise und können leicht von einem Typ zum anderen umgeschaltet werden.
Wie bei der PTP Bewegungsanweisung gilt: wenn dies die erste Anweisung ist, die einem Programm hinzugefügt wird, werden zwei weitere Anweisungen vor der Bewegungsanweisung hinzugefügt: eine Auswahl des Bezugssystems und eine des Werkzeug Bezugssystems.
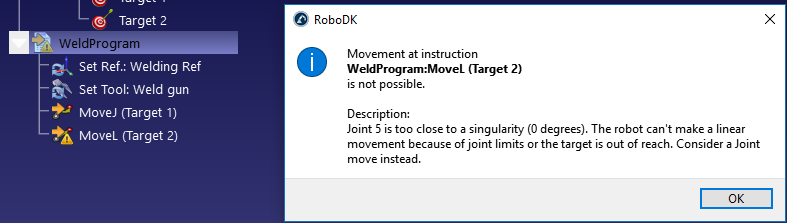
Im Gegensatz zu PTP Bewegungen sind Lineare Bewegungen für Robotersingularitäten und Achsengrenzen anfällig. Zum Beispiel können 6-Achs Roboter nach einer linearen Bewegung keine Singularität verlassen. Das folgende Bild zeigt ein Beispiel, indem Gelenk 5 zu nahe an einer Singularität (0 Grad) ist. [...] Verwenden Sie stattdessen eine PTP Bewegung. Dies wird in der folgenden Abbildung gezeigt.
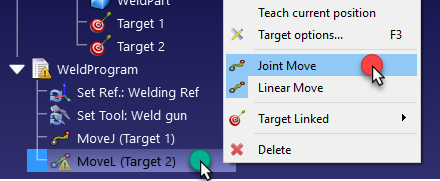
Wenn eine Linearbewegung nicht unbedingt notwendig ist, sollte sie in eine PTP Bewegung geändert werden. Dies kann über einen Rechtsklick auf die Anweisung geschehen.
Alternativ müssen das Ziel, der TCP und die Position des Bezugssystems verändert werden, um die Singularität zu verhindern.