Wählen Sie Programm➔ Simulationsereignis, um ein bestimmtes Simulationsereignis zu provozieren. Simulationsereignisse haben keinen Einfluss auf generierten Code und werden nur verwendet, um ein bestimmtes Ereignis für Simulationszwecke, also eine optische Ausgabe, zu ermöglichen. Simulationsereignisse mit der grafischen Benutzeroberfläche ermöglichen es:
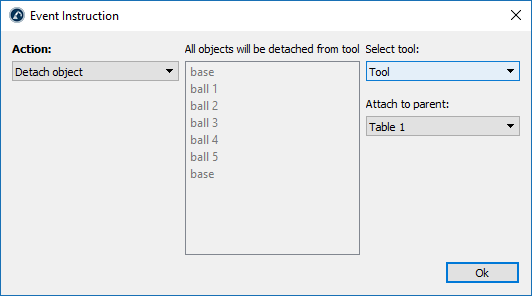
●Werkzeuge anzubringen/zu lösen
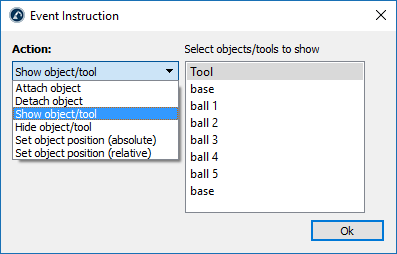
●Objekte/Werkzeuge anzuzeigen oder zu verstecken
●Die Position von Objekten und Bezugssystem zu ändern
Wenn sich der Roboter beispielsweise an einen bestimmten Ort bewegt, um ein Objekt zu greifen, können wir ein Ereignis Objekt anheften einrichten, um dieses Objekt zusammen mit dem Roboter zu bewegen. Anschließend können wir ein Ereignis Objekt lösen verwenden, um alle Objekte abzulösen, die das Werkzeug gegriffen hat
Anmerkung: Bestimmte Programme können mit Hilfe von Makros (Programmierkenntnisse sind erforderlich) simuliert werden. Es ist beispielsweise mit Hilfe der API möglich Objekte in bestimmten Positionen verschwinden zu lassen. Dies kann für Pick and Place Simulationen nützlich sein.
Anmerkung: Will man ein Objekt an ein Werkzeug anbringen, so wird das örtlich nächste Objekt verwendet, wenn dieses nicht weiter als ein bestimmter Abstand entfernt ist. Dieser Abstand beträgt standardmäßig 200 mm und kann unter Extras ➔ Optionen ➔ Maximaler Abstand, um Objekte an Roboterwerkzeug anzubringen geändert werden. Ebenfalls wird standardmäßig der Abstand zwischen Objekt Bezugssystem und TCP Position gemessen. Alternativ kann man den Abstand zwischen TCP und Objekt Geometrie verwenden, indem man kürzester Abstand zwischen TCP und Objekt Form verwendet.