Ballbar Test
In dem folgenden Abschnitt werden die erforderlichen Schritte zur Durchführung der Ballbar-Messungen beschrieben.
Sie sollten zwei Roboterprogramme haben:
●BallbarSetup: Mit diesem Programm kann die Mitte des Kugeltests an der Stelle eingestellt werden, an der Sie die Robotergelenke aufgenommen haben.
●BallbarTest: Dieses Programm ist der kreisförmige Pfad um den mittleren Toolcup, um die Messung mit dem Ballbar durchzuführen.
Um sicherzustellen, dass die mittlere Toolcup an der richtigen Position ist, müssen wir das Programm BallbarSetup ausführen. Der Roboter bewegt sich mit einem linearen Ansatz zum Mittelpunkt. Sie müssen anschließend die magnetische Unterstützung platzieren und sperren.
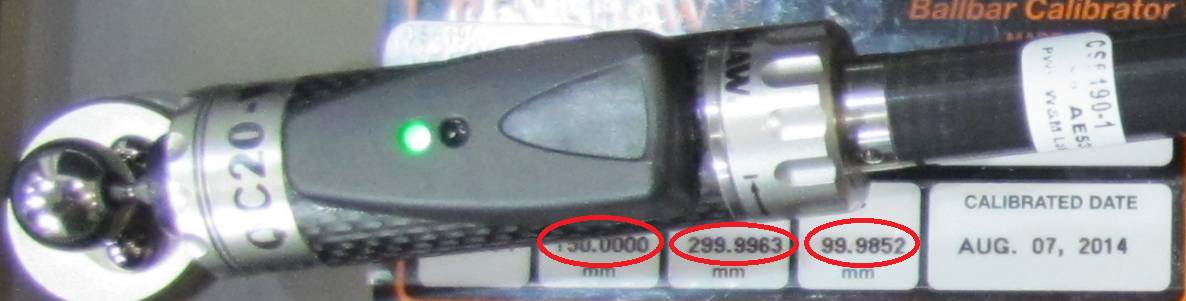
Es muss sichergestellt sein, dass die Mastering-Parameter des Ballbar-Kits korrekt eingegeben wurden (siehe folgendes Bild). Diese Werte müssen in den Fällen "Ballbar Referenzabstand ..." aus dem Testparametermenü eingefügt werden. Der Ballbar kann diese Abstände plus oder minus 1 mm mit einer Genauigkeit von einem Mikrometer messen. Die Genauigkeit ist für Industrieroboter ausreichend, der Messbereich kann jedoch in bestimmten Fällen begrenzt sein.
.
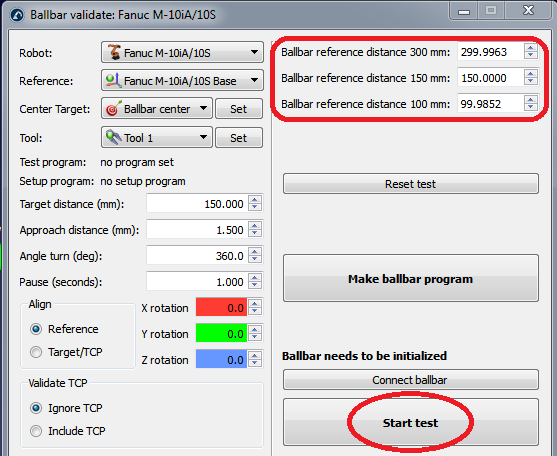
Sie können mit dem Test beginnen, indem sie "Test starten" wählen (es ist nicht erforderlich, vorher "Ballbar verbinden" auszuwählen). In einem neuen Fenster wird der Status der Ballbar-Verbindung angezeigt. Wenn der Ballbar nicht erkannt wurde oder Probleme auftreten, müssen Sie das Ballbar-Verbindungsfenster schließen, den Ballbar ausschalten, wieder einschalten und versuchen, den Test erneut zu starten. Wenn das Problem weiterhin besteht, vergewissern Sie sich, dass Sie über eine geeignete Bluetooth-Verbindung verfügen
Sobald eine Bluetoothverbindung mit dem Ballbar hergestellt wurde, leitet RoboDK den Benutzer durch folgende Schritte:
1.Initialisieren Sie den Ballbar mit der für den Test gewählten Distanz.
2.Bewegen Sie den Roboter in die Startposition (das Programm wird angehalten, bevor Sie fortfahren)
3.Der Benutzer muss anschließend den Ballbar in den Roboter legen.
4.Starten Sie den Test, indem Sie auf dem Computerbildschirm OK wählen. Der Roboter bewegt sich erst, wenn Sie fortsetzen am Roboter-Teach-Pendant gewählt haben.
5.Wenn alles korrekt ist, erscheint ein neues Fenster, in dem die Messung des Ballbar angezeigt wird.
6.Sie können mit dem Roboterprogramm fortfahren, um den Roboter entlang des Pfads zu bewegen.
7.Wenn der Roboter die Bewegung beendet hat, können Sie die Messungen stoppen (im Uhrzeigersinn und gegen den Uhrzeigersinn).
Wenn der Test abgeschlossen ist, zeigt RoboDK das Ergebnis des Tests an und fordert den Benutzer auf, einen Bericht im PDF-Format zu speichern.
Schritt 4 ist wichtig, um den Beginn und das Ende des Tests zu erkennen. Diese Grenzen werden erkannt, weil der Roboter eine radiale Bewegung von etwa 1,5 mm ausführt, um den Beginn und das Ende der Messungen (am Anfangs- und Endpunkt des Pfades) auszulösen.