Bearbeiten der Ballbar Testparameter
Der folgende Bildschirm ist im Menü der Ballbar-Testparameter zu sehen. Sie können darauf zugreifen, indem Sie in der Station auf den Punkt Ballbar-Genauigkeitsprüfung doppelklicken (siehe vorheriger Schritt).
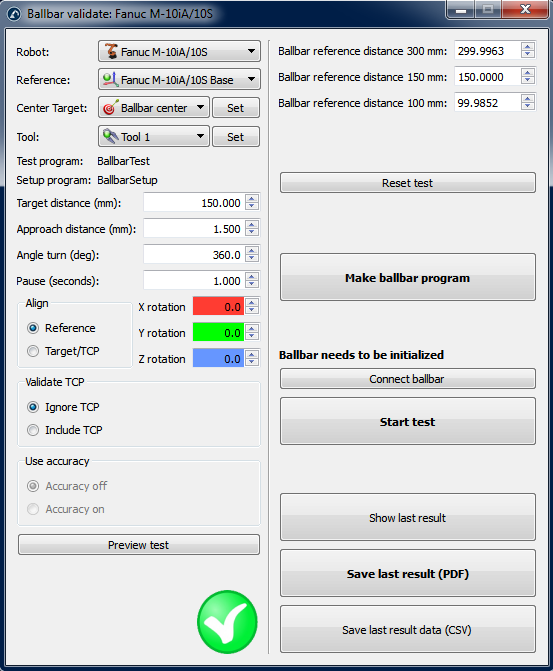
Es ist eventuell der Fall, dass der Ballbar-Test standardmäßig nicht möglich ist. Die Durchführbarkeit des Tests hängt von all diesen Parametern inklusive der Achswinkel des Roboters und der Position des TCP ab.
Wenn der Test überhaupt nicht durchführbar ist, können Sie "Vorschautest" wählen und werden wahrscheinlich eine unvollständige Sequenz sehen. In diesem Fall können Sie die "Winkelumdrehung (deg)" verringern, damit das Programm durchführbar ist. Ist dies nicht der Fall, können Sie den Radius des Kreises verkleinern ("Abstand des Ziels"). Mit dem Ballbar von Renishaw können Sie Abstände von 100 mm, 150 mm und 300 mm mit einem Fehler von +/- 1 mm testen. Der "Annäherungsabstand (mm)" und die Pause ("Pause (Sekunden)") können standardmäßig eingestellt bleiben. Diese Parameter ermöglichen das Erkennen des Beginns und des Endes des Tests.
Die Testebene ist in Bezug auf das Bezugssystem der Roboterbasis ausgerichtet ("Referenz" im Abschnitt "Ausrichten"). Dies bedeutet, dass die XY-Ebene des Roboters Bezugssystem zum Erstellen des Kreises verwendet wird. Sie können den Test in Bezug auf das Bezugssystem des Werkzeugs durchführen. In diesem Fall wird die XY-Ebene des Werkzeugs verwendet (wenn das Zentrum bekannt ist). Wir können zusätzliche Rotationen in Bezug auf die X-,Y- und / oder Z-Achse des Referenzrahmens in beiden Fällen hinzufügen.
Wenn Sie bestimmte Parameter ändern (z.B. das Hinzufügen des Tools in der Validierung), wird die Meldung "Wichtig: TCP muss korrekt sein" angezeigt. Dies bedeutet, dass die Bewegungen in Bezug auf die Werkzeugmitte berechnet werden. Andernfalls können Sie TCP-Fehler haben und der Test wird trotzdem machbar sein.
Wenn Sie die Option "TCP einbeziehen" auswählen, ändert sich die Werkzeugorientierung mit der Bewegung entlang des Kreises. Diese Option ermöglicht es, den Fehler des Roboters und des Werkzeugs als ein System zu bewerten. Ansonsten prüfen Sie nur den Fehler des Roboters (TCP ignorieren).