Offline Vorbereitung
Ein Roboterprogramm muss vorbereitet sein, um den Ballbar-Test durchzuführen. Das Roboterprogramm ist ein kreisförmiger Pfad um einen Mittelpunkt herum. In diesem Abschnitt wird erläutert, wie Sie das Programm vorbereiten. Bevor Sie fortfahren, sollten Sie sich das folgende Einführungsvideo ansehen: https://robodk.com/ballbar-test
Was von der Roboterzelle benötigt wird:
1.T Die Achswinkel des Roboters bei der Einstellung der Schwenkstütze (Kreismittelpunkt).
2.Die [X, Y, Z] -Werte des TCP des Werkzeugs (Werkzeugposition relativ zum Roboterflansch). Diese Werte sind sehr wichtig, wenn zusammen mit der Validierung des Roboters ein Validierungswerkzeug erstellt werden soll. Ansonsten ist diese Information nicht wichtig (eine Schätzung ist ausreichend), da die Genauigkeit des TCP nicht mit dem Ballbar-Test validiert wird.
Eine neue RoboDK Station erstellen
Die folgenden Schritte müssen befolgt werden um den Test offline vorzubereiten:
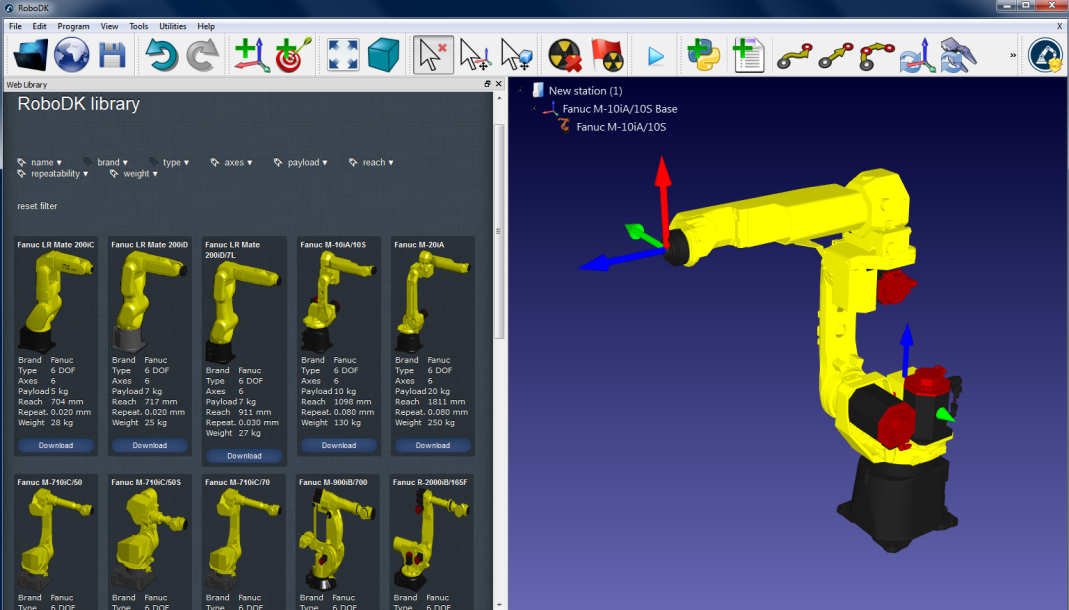
1.Wählen Sie den Roboter:
a.Wählen Sie Datei➔Online Bibliothek Öffnen. Ein Fenster mit einer Liste von Robotern sollte erscheinen.
b.(Optional) Benutzen Sie filter um die Wahl des Roboters zu erleichtern.
c.Finden Sie Ihren Roboter und wählen Sie Download.
Alternativ Wählen Sie Datei➔Öffnen… und wählen Sie eine Roboterdatei vom Computer. Dieses kann von der Website heruntergeladen werden: https://robodk.com/libraryoder nach einer Roboterkalibrierung erhalten werden.
2.Ballbar Test Modul in die Station hinzufügen:
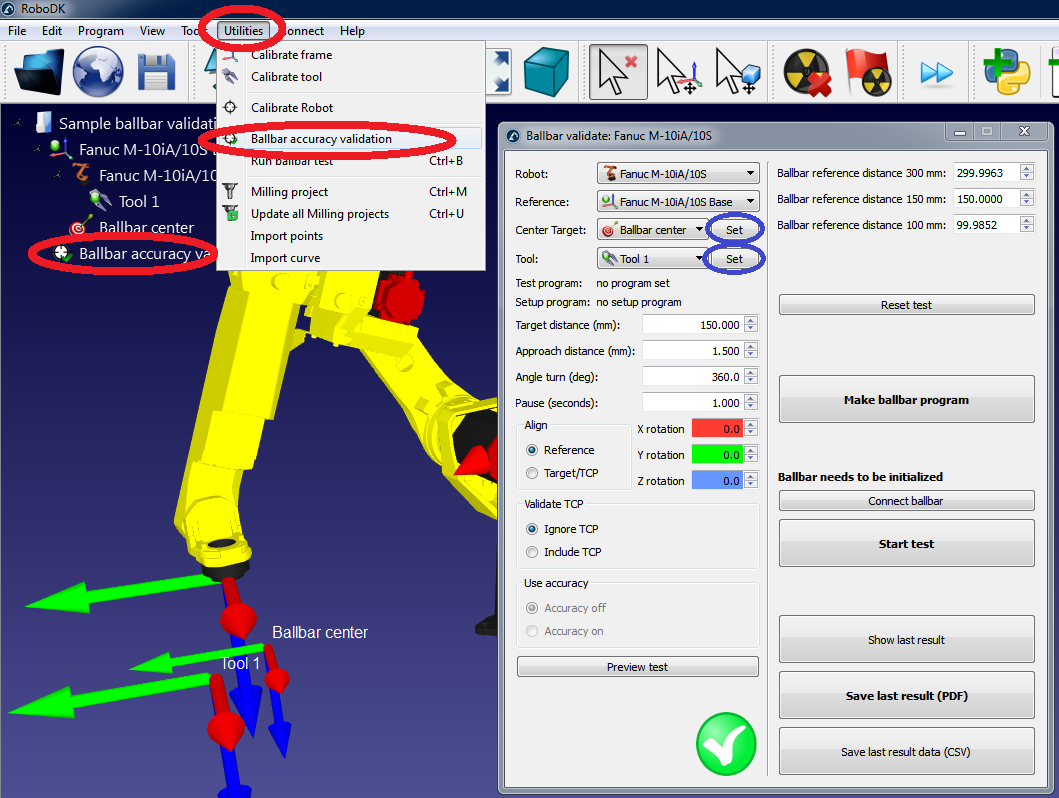
a.Wählen Sie Dienstprogramme➔Ballbar Genauigkeitstest
b.Das folgende Fenster erscheint und a ein Ziel Ballbarmittelpunkt wird automatisch erstellt. Wenn der Roboter keinen TCP hat, wird der TCP Tool 1 automatisch erstellt.
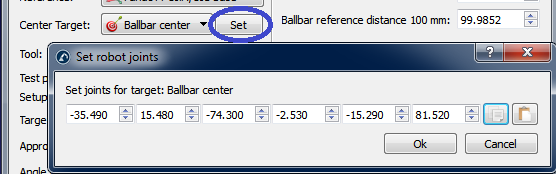
3.Fügen Sie die Robotergelenke der Mitte des Kugelstangentests ein (Ziel Ballbar Mittelpunkt):
a.Wählen Sie Einstellen neben dem Ziel Ballbar Mittelpunkt aus
b.Geben Sie die Achswinkel ein (Achsen 1 bis 6).
c.Wählen Sie OK.
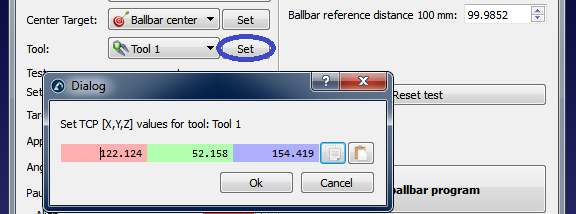
4.Geben Sie die TCP Koordinaten ein:
a.Wählen Sie Einstellen neben dem Werkzeug aus (Tool 1 in diesem Beispiel)
b.Geben Sie die X,Y,Z Koordinaten des TCP ein (relativ zum Roboter Endeffektor)
c.Wählen Sie OK
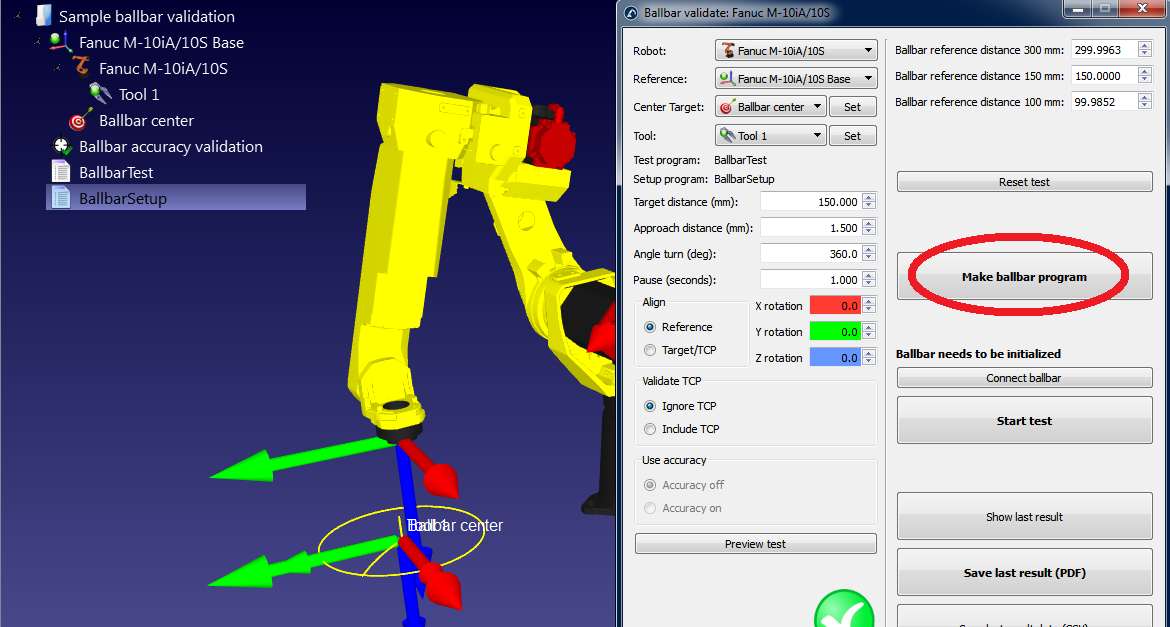
5.Erstellen von Programmen:
a.Wählen Sie Ballbar Programm Erstellen und das Programm wird erstellt. Dabei werden zwei Programme erscheinen:
i.BallbarSetup: Dieses Programm wird verwendet, um den Rotationsmittelpunkt der Werkzeugaufnahme (Mittelpunkt des Kreises) an der Stelle anzuordnen, an der er zuvor positioniert war
ii.BallbarTest: Mit diesem Programm wird der Kreis um den Drehpunkt (Mittelpunkt des Kreises) zur Datenerfassung mit dem Ballbar erstellt
b.Doppelklicken Sie auf die neu erstellten Programme. RoboDK simuliert den Roboter, der die Programme ausführt.
Wenn der Ballbar-Test mit den Standardeinstellungen nicht möglich ist, können Sie die Testparameter ändern. Weitere Informationen zum Ändern dieser Einstellungen finden Sie im nächsten Abschnitt.
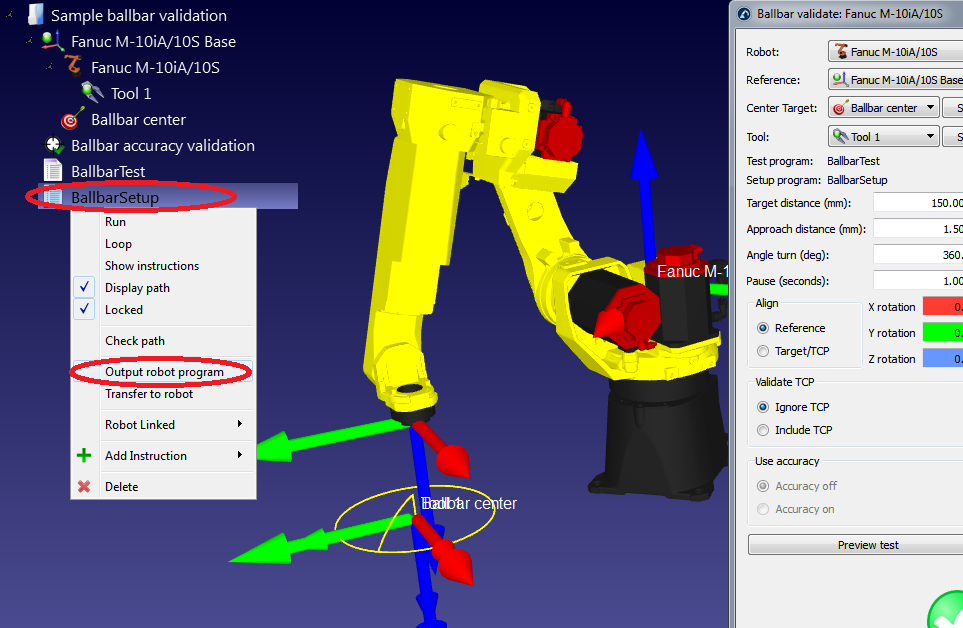
6.Sobald das Roboterprogramm Ihren Vorstellungen entspricht, können die Programmdateien für den Roboter generiert werden:
a.Rechsklicken Sie auf das BallbarTest Programm.
b.Wählen Sie Roboter Programm erstellen.
c.Wiederholen Sie dies für das BallbarSetup Programm (alle Programme können automatisch auf dem Desktop durch Drücken von F6 erzeugt werden).
d.Anschließend können die Programme auf einer USB-Festplatte gespeichert und an den Roboter übertragen werden. Eine FTP-Verbindung kann auch mit den meisten Robotern verwendet werden.
7.Wählen Sie schließlich Datei➔Station speichern, um die RoboDK-Station in einer einzigen Datei zu speichern. Das Projekt kann in RoboDK durch Doppelklick auf die Datei (RDK-Format) fortgesetzt werden.
Bearbeiten der Ballbar Testparameter
Der folgende Bildschirm ist im Menü der Ballbar-Testparameter zu sehen. Sie können darauf zugreifen, indem Sie in der Station auf den Punkt Ballbar-Genauigkeitsprüfung doppelklicken (siehe vorheriger Schritt).
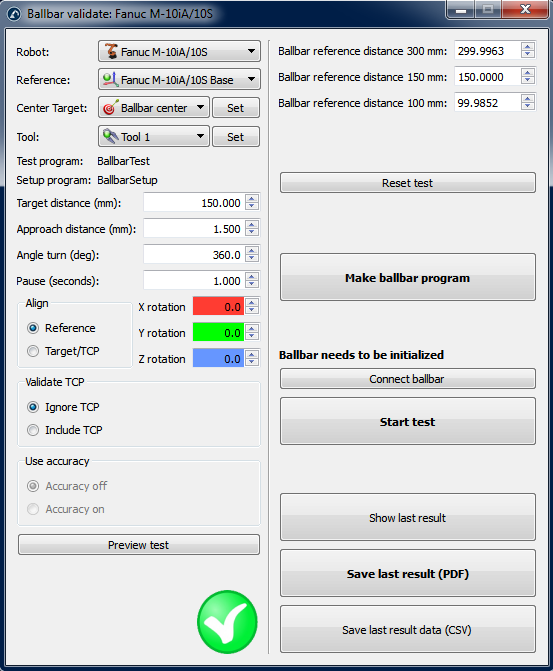
Es ist eventuell der Fall, dass der Ballbar-Test standardmäßig nicht möglich ist. Die Durchführbarkeit des Tests hängt von all diesen Parametern inklusive der Achswinkel des Roboters und der Position des TCP ab.
Wenn der Test überhaupt nicht durchführbar ist, können Sie "Vorschautest" wählen und werden wahrscheinlich eine unvollständige Sequenz sehen. In diesem Fall können Sie die "Winkelumdrehung (deg)" verringern, damit das Programm durchführbar ist. Ist dies nicht der Fall, können Sie den Radius des Kreises verkleinern ("Abstand des Ziels"). Mit dem Ballbar von Renishaw können Sie Abstände von 100 mm, 150 mm und 300 mm mit einem Fehler von +/- 1 mm testen. Der "Annäherungsabstand (mm)" und die Pause ("Pause (Sekunden)") können standardmäßig eingestellt bleiben. Diese Parameter ermöglichen das Erkennen des Beginns und des Endes des Tests.
Die Testebene ist in Bezug auf das Bezugssystem der Roboterbasis ausgerichtet ("Referenz" im Abschnitt "Ausrichten"). Dies bedeutet, dass die XY-Ebene des Roboters Bezugssystem zum Erstellen des Kreises verwendet wird. Sie können den Test in Bezug auf das Bezugssystem des Werkzeugs durchführen. In diesem Fall wird die XY-Ebene des Werkzeugs verwendet (wenn das Zentrum bekannt ist). Wir können zusätzliche Rotationen in Bezug auf die X-,Y- und / oder Z-Achse des Referenzrahmens in beiden Fällen hinzufügen.
Wenn Sie bestimmte Parameter ändern (z.B. das Hinzufügen des Tools in der Validierung), wird die Meldung "Wichtig: TCP muss korrekt sein" angezeigt. Dies bedeutet, dass die Bewegungen in Bezug auf die Werkzeugmitte berechnet werden. Andernfalls können Sie TCP-Fehler haben und der Test wird trotzdem machbar sein.
Wenn Sie die Option "TCP einbeziehen" auswählen, ändert sich die Werkzeugorientierung mit der Bewegung entlang des Kreises. Diese Option ermöglicht es, den Fehler des Roboters und des Werkzeugs als ein System zu bewerten. Ansonsten prüfen Sie nur den Fehler des Roboters (TCP ignorieren).