Offline Setup
Es wird empfohlen, eine virtuelle Umgebung des realen Setups in RoboDK (Offline-Setup) zu erstellen, um den Pfad und die Positionen für die Tests vorzubereiten. Dies kann getan werden, bevor Sie den Roboter und den Tracker haben. Hierzu benötigen sie nur einen Computer auf dem RoboDK installiert ist. RoboDK-Kalibrierungs- und Pfadvalidierungs-Setup-Beispiele können aus diesem Ordner heruntergeladen werden:
https://www.robodk.com/downloads/calibration/
RoboDK verfügt über ein Dienstprogramm zum Generieren der Konfigurationen und des empfohlenen Pfads gemäß ISO9283-Standard. Um dieses Dienstprogramm zu verwenden:
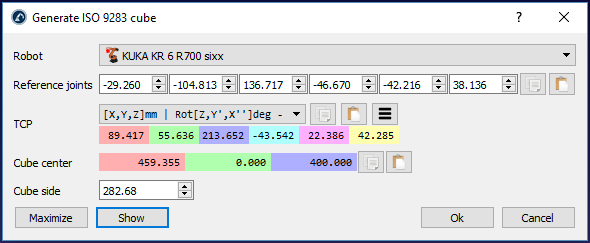
1. Dienstprogramme➔Erstellen eines ISO 9283 Cube (Ziele und Pfad)
2. Geben Sie die Referenzverbindungen ein (Roboterposition, in der das Werkzeug zum Tracker zeigt)
3. Passen Sie die Position und Größe des Würfels an
4. Wählen Sie OK
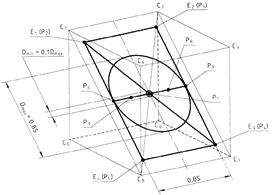
Dadurch werden die 5 Ziele erstellt, die in der ISO-Norm beschrieben sind, sowie der Pfad, der für die Prüfung der Pfadgenauigkeit empfohlen wird. Diese Ziele und der Pfad bleiben in einem Würfel vor dem Roboter. Wir können die gewünschte Würfelseite sowie die Mitte (Ziel "ISO p1") und die Referenzverbindungen, die die Ausrichtung des Pfads definieren, verschieben. Es ist auch möglich, die Würfelgröße zu maximieren, um den größten Würfel zu finden, der in den Arbeitsbereich des Roboters passt
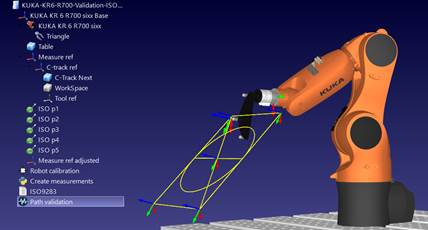
Eine Beispielstation mit Roboterkalibrierungs- und Validierungsoptionen ist im folgenden Bild zu sehen.