Resultate
Sobald der Pfadgenauigkeitstest abgeschlossen ist, können Sie einen PDF-Bericht erstellen, indem Sie diese Option im Fenster Pfadvalidierung auswählen. Dies erzeugt ein PDF mit einigen Statistiken und Graphen über die Pfadgenauigkeit, Geschwindigkeit und Beschleunigung.
Die Ergebnisse des in den vorherigen Abschnitten vorbereiteten Beispieltests werden in den folgenden Bildern gezeigt. In diesem Beispiel wurde das ISO9283-Programm in zwei verschiedenen Modi ausgeführt:
●Manueller Modus bei 75 mm/s Geschwindigkeit
●Automatik Modus bei 300mm/s Geschwindigkeit
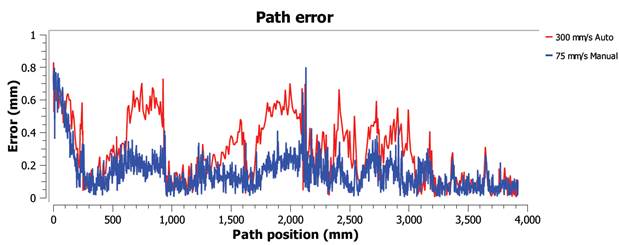

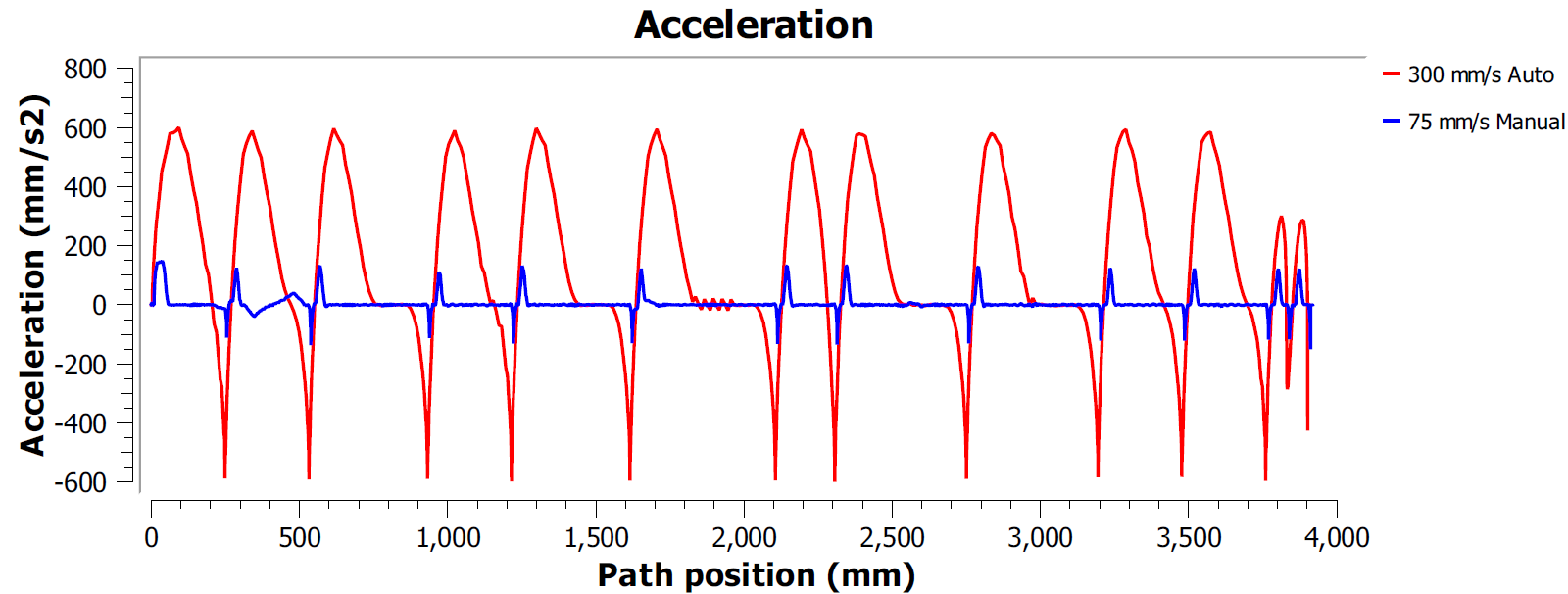
In diesem Beispiel wurden beide Programme mit der Option Feine Genauigkeit erstellt. Dies bedeutet, dass der Roboter an jedem Punkt anhält, um den Weg so genau wie möglich zu absoliveren. In diesem Fall ist es üblich, hohe Beschleunigungen und Verzögerungen entlang des Weges festzustellen, da die Geschwindigkeit am Ende jeder Linien- oder Kreisbewegung Null sein muss.
Die meisten Robotermarken bieten Glättungsoptionen an, um diesen Effekt durch Glätten der Kanten zu vermeiden. Dies nennt ABB beispielsweise ZoneData. Dabei wird die Angabe einer Genauigkeitszone ermöglicht, in der der Controller die Kanten glätten kann, Fanuc nennt es CNT und erlaubt die Angabe eines Prozentsatzes der Glättung proportional zur Geschwindigkeit, KUKA bietet die $ ADVANCE-Anweisung mit dem C_DIS Flag und Universal Robots ermöglicht die Angabe eines Blendradius zum Glätten der Kanten.
Daher ermöglicht der Pfadgenauigkeitstest das Auffinden eines guten Kompromisses zwischen dem Beibehalten einer „glatten“ Geschwindigkeit, während akzeptable Genauigkeitsniveaus in der Nähe der Pfadkanten beibehalten werden.
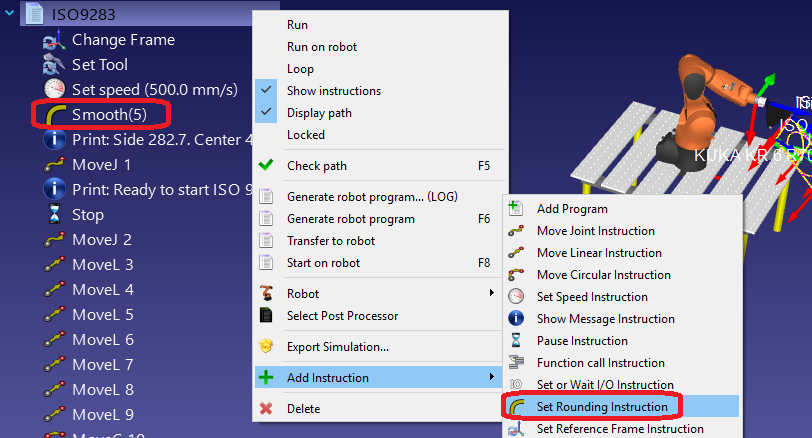
Es ist möglich, den Rundungsparameter sowie die Programmgeschwindigkeit in RoboDK anzugeben. So bearbeiten Sie ein Programm für einen solchen Test:
1.Klicken Sie mit der rechten Maustaste auf das Programm
2.Wählen Sie Anweisungen anzeigen
3.Wählen Sie die erste oder zweite Anweisung
4.Wählen Sie Programm➔Rundungsanweisung einstellen, um eine Rundungsgenauigkeit anzugeben
5.Wählen Sie Programm➔Geschwindigkeitsanweisung einstellen, um die Geschwindigkeit anzugeben