ISO9283 Performance Testing
Einführung
Die ISO-Norm "ISO9283: Manipulation von Industrierobotern - Leistungskriterien und zugehörige Prüfverfahren" beschreibt Tests zur Bewertung der Leistungsfähigkeit von Industrierobotern. Unter anderem werden einige Verfahren beschrieben, mit denen die Genauigkeit der Roboterposition, die Wiederholgenauigkeit und die Bahngenauigkeit genau gemessen werden können.
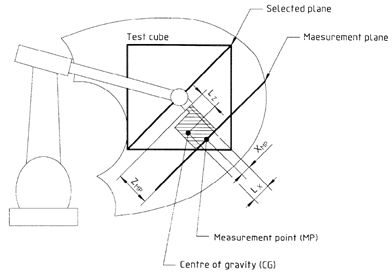
Gemäß der ISO9283 Norm sollten alle Tests innerhalb des sogenannten ISO-Testwürfels durchgeführt werden. Der ISO-Testwürfel ist der größte Würfel, der in den Arbeitsbereich des Roboters passt. Darüber hinaus sollte die Positionsgenauigkeit und Wiederholbarkeit 30 Mal in fünf verschiedenen Konfigurationen gemessen werden. Es ist bekannt, dass 5 Konfigurationen nicht ausreichen, um eine angemessene Genauigkeitsmessung für moderne Roboter zu ermöglichen.
Die meisten Roboterhersteller bieten nur dann eine Positionsgenauigkeit des Roboters, wenn der Roboter kalibriert wurde, und verwenden darüber hinaus mindestens 100 verschiedene Konfigurationen, um entsprechende Positionsgenauigkeitsstatistiken bereitzustellen. Industrieroboter arbeiten sehr gut wiederholbar, aber nicht genau; Daher kann die Genauigkeit eines Industrieroboters durch Kalibrierung verbessert werden.
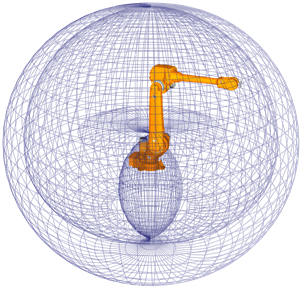
Typischer Roboter Arbeitsbereich in den 1980er Typischer moderner Arbeitsbereich
Die ISO9283 Norm wird häufig für Wiederholbarkeits- und Weggenauigkeitstests verwendet, selbst wenn der Roboter nicht kalibriert wurde.

Es wird empfohlen, das folgende Video anzusehen. Dieses zeigt Pfadgenauigkeitstests mit RoboDK: https://youtu.be/yMQjqAQY1iE.
RoboDK kann auch zum Kalibrieren der Roboter sowie zum Testen ihrer Leistung vor und nach der Kalibrierung verwendet werden. Schließlich kann RoboDK auch dazu verwendet werden, die Genauigkeit des Roboters vor und nach der Kalibrierung durch Ballbar-Tests zu testen.
Anforderungen
Die folgenden Elemente sind erforderlich, um RoboDK zu installieren und die Genauigkeitsprüfungen ordnungsgemäß durchzuführen:
1.Ein oder mehrere Industrieroboter
2.Ein Messsystem: Jeder Lasertracker wie Leica, API oder Faro und ein optisches KMG wie die C-Track Stereokamera von Creaform sollten ausreichend sein
3.RoboDK muss installiert sein, sowie eine entsprechende Lizenz für ISO9283-Tests ist erforderlich. Für Netzwerklizenzen ist eine Internetverbindung erforderlich, um die Lizenz zu überprüfen. So installieren oder aktualisieren Sie RoboDK für einen ISO9283-Leistungstest:
a.Laden Sie RoboDK aus dem Download-Bereich herunter
https://robodk.com/download
b.Richten Sie den Treiber für das Messsystem ein (nicht für Creaform Optical CMM erforderlich).
Entpacken und kopieren Sie den entsprechenden Ordner:
API Laser tracker: https://robodk.com/downloads/private/API.zip (OTII und Radian Tracker)
Faro Laser Tracker: https://robodk.com/downloads/private/Faro.zip (alle Faro Trackers)
Leica Laser Tracker: https://robodk.com/downloads/private/Leica.zip (alle Leica Trackers)
in den Ordner: C:/RoboDK/api/
Offline Setup
Es wird empfohlen, eine virtuelle Umgebung des realen Setups in RoboDK (Offline-Setup) zu erstellen, um den Pfad und die Positionen für die Tests vorzubereiten. Dies kann getan werden, bevor Sie den Roboter und den Tracker haben. Hierzu benötigen sie nur einen Computer auf dem RoboDK installiert ist. RoboDK-Kalibrierungs- und Pfadvalidierungs-Setup-Beispiele können aus diesem Ordner heruntergeladen werden:
https://www.robodk.com/downloads/calibration/
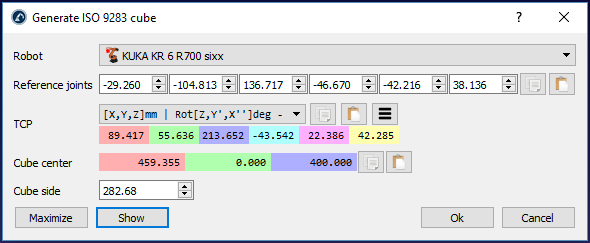
RoboDK verfügt über ein Dienstprogramm zum Generieren der Konfigurationen und des empfohlenen Pfads gemäß ISO9283-Standard. Um dieses Dienstprogramm zu verwenden:
1. Dienstprogramme➔Erstellen eines ISO 9283 Cube (Ziele und Pfad)
2. Geben Sie die Referenzverbindungen ein (Roboterposition, in der das Werkzeug zum Tracker zeigt)
3. Passen Sie die Position und Größe des Würfels an
4. Wählen Sie OK
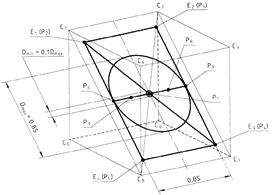
Dadurch werden die 5 Ziele erstellt, die in der ISO-Norm beschrieben sind, sowie der Pfad, der für die Prüfung der Pfadgenauigkeit empfohlen wird. Diese Ziele und der Pfad bleiben in einem Würfel vor dem Roboter. Wir können die gewünschte Würfelseite sowie die Mitte (Ziel "ISO p1") und die Referenzverbindungen, die die Ausrichtung des Pfads definieren, verschieben. Es ist auch möglich, die Würfelgröße zu maximieren, um den größten Würfel zu finden, der in den Arbeitsbereich des Roboters passt
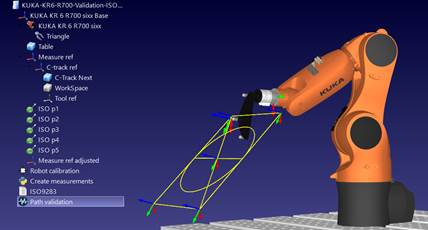
Eine Beispielstation mit Roboterkalibrierungs- und Validierungsoptionen ist im folgenden Bild zu sehen.
Positionier Genauigkeit und Wiederholbarkeit
Die gleiche Prozedur, die für die Positionsgenauigkeitsvalidierung während der Roboterkalibrierung verwendet wird, kann auch für die Positionsgenauigkeitsprüfung verwendet werden. Wiederholbarkeitsstatistiken können erlangt werden, indem die Messungen sequentiell durch die gleiche Gruppe von Punkten durchgeführt werden. Der einzige Unterschied zwischen der Durchführung der Validierung alleine bzw. der Kalibrierung und Validierung gemeinsam besteht darin, dass für die erste Option keine Lizenz für die Roboterkalibrierung erforderlich ist.
Um solche Validierungen durchzuführen, wählen Sie das Menü:
o Dienstprogramme➔Testposition Genauigkeit und Wiederholbarkeit (ISO 9283)
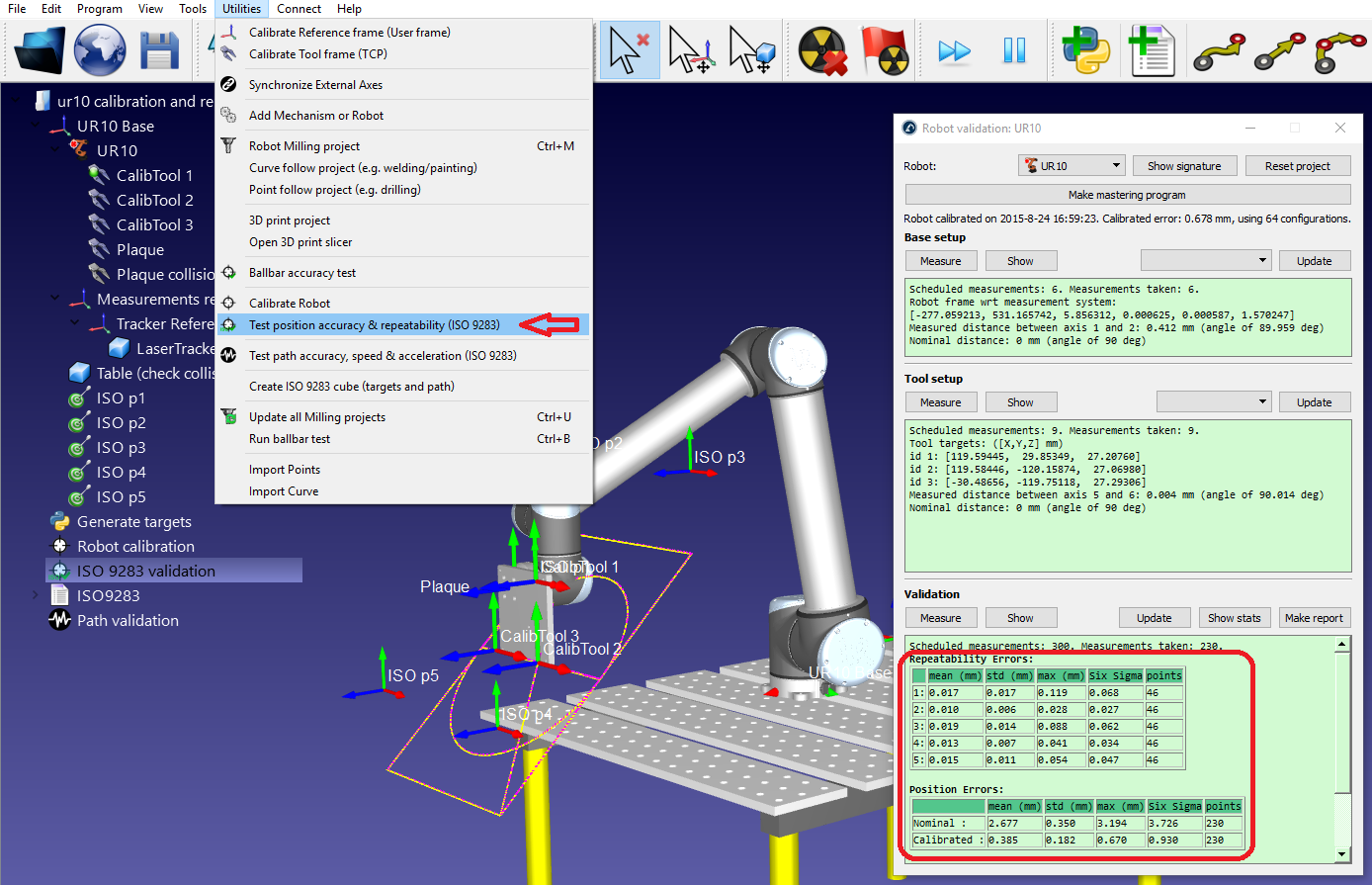
Diese Tests erfordern die Identifizierung der Roboterbasis in Bezug auf das Messbezugssystem (Basisaufbau) und auch des Werkzeug Bezugssystem in Bezug auf den Roboterflansch (Werkzeugaufbau).
Es ist möglich, einen PDF-Bericht zu erhalten, wenn die Positionsgenauigkeits- und Wiederholbarkeitstests abgeschlossen sind.
Pfadgenauigkeit
Um Pfadgenauigkeitstests durchzuführen, muss ein RoboDK-Roboterprogramm erstellt werden, z.B. das ISO9283 Programm, das mit dem ISO-Würfel-Dienstprogramm erstellt wurde. Sie können das herstellerspezifische Roboterprogramm erzeugen, indem Sie das Programm auswählen und F6 drücken (oder wählen Sie Programm ➔ Programm erstellen). Alternativ ist es möglich, jedes andere in RoboDK erstellte Programm zu verwenden (z. B. eine Gerade, einen Kreis oder ein Quadrat).
Es ist zudem erforderlich, ein Messsystem zu haben, das die Position des Endeffektors verfolgen und die Positionsmessungen in Bezug auf ein Bezugssystem bereitstellen kann. Es müssen die grundlegenden Setup- und Tool-Setup-Verfahren in RoboDK verwendet werden (erforderlich für Kalibrierungs- oder Positionsgenauigkeitstests), um die Roboterbasis und das Werkzeugbezugssystem zu identifizieren.
Die Messdaten müssen erfasst werden, während der Roboter entlang des Programms bewegt wird. Die Messungen sollten unter Verwendung der Standardsoftware des Herstellers vom Messsystem kontinuierlich aufgezeichnet werden. Die Messungen sollten als CSV- oder TXT-Datei exportiert werden. Diese Dateien müssen XYZ-Positionsdaten sowie den Zeitstempel für jede Messung enthalten. Optional können diese Messungen die Ausrichtung des Werkzeugs in Bezug auf die Roboterbasis enthalten.
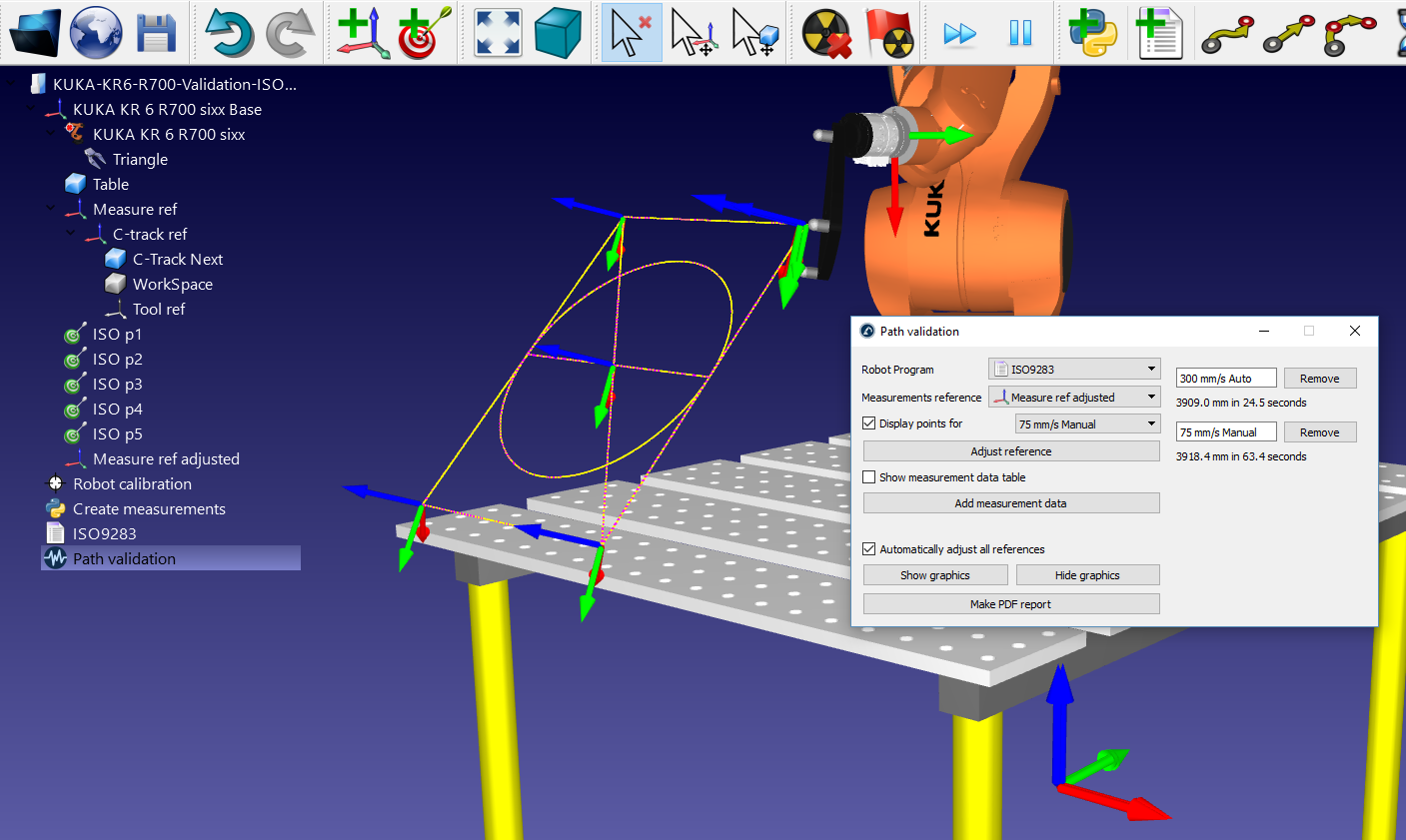
So starten Sie die Pfadvalidierung in RoboDK:
1.Wählen Sie Dienstprogramme➔Pfadgenauigkeit, Geschwindigkeit und Beschleunigung testen (ISO 9283)
2.Wählen Sie das zu validierende Programm aus dem Dropdown-Menü
3.Geben Sie den Referenzrahmen an, der für die Messungen verwendet wird
4.Importieren Sie die Messdaten, indem Sie Messdaten hinzufügen wählen. Alternativ können Sie die CSV- oder TXT-Dateien, die die Messungen enthalten, per Drag & Drop in das Fenster ziehen.
Wählen Sie letztendlich PDF-Bericht erstellen, um ein PDF mit einigen Statistiken und Grafiken über die Pfadgenauigkeit, Geschwindigkeit und Beschleunigung zu generieren. Es ist möglich, denselben Test mehrmals unter verschiedenen Bedingungen (unterschiedliche Geschwindigkeiten, unterschiedliche Werte für Überschleifen, unterschiedliche Nutzlasten, ...) durchzuführen, um diese Parameter im selben Bericht zu vergleichen.
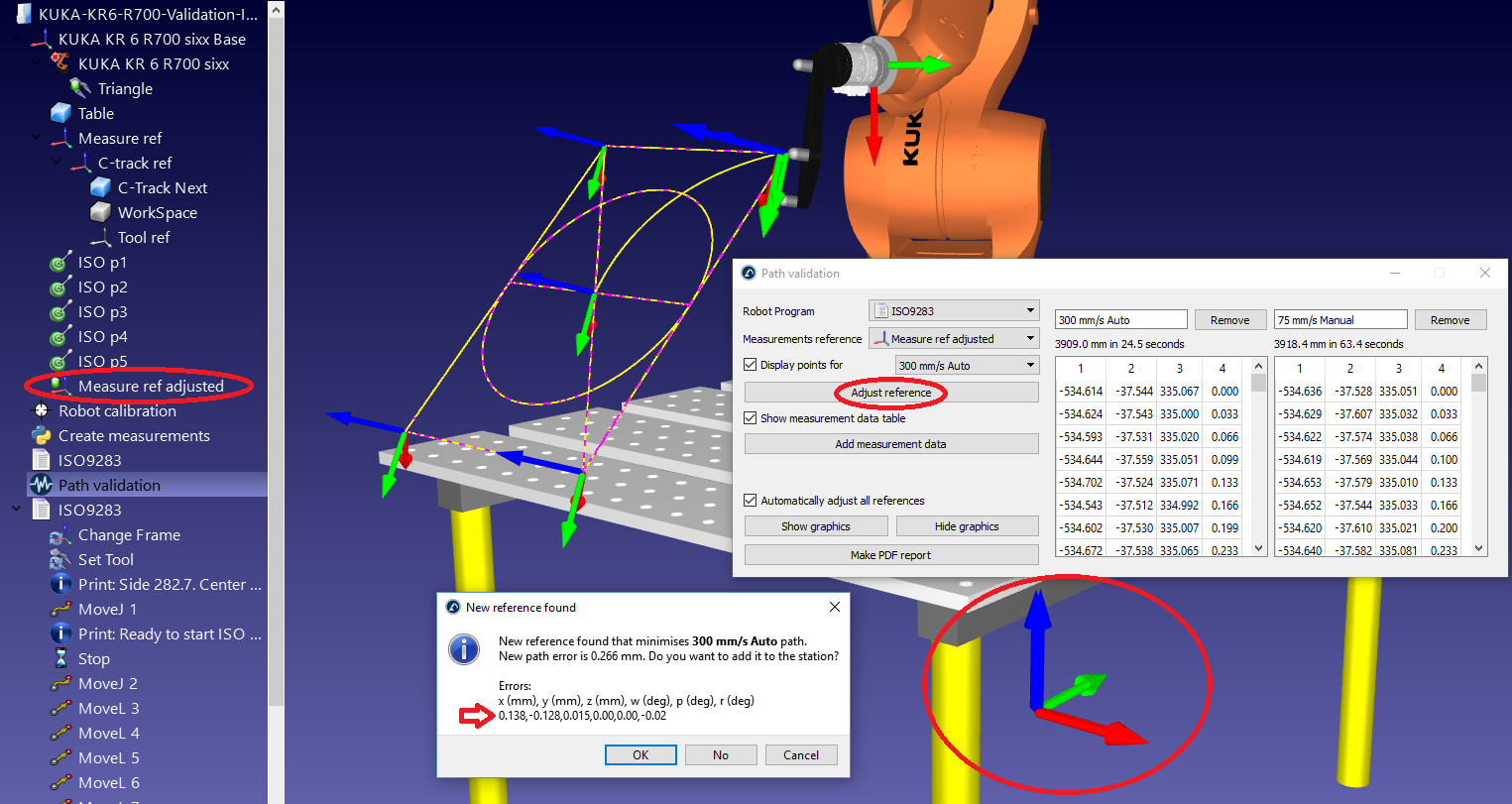
Die Messpunkte können violett dargestellt werden. Diese Messungen sollten mit dem gelben Pfad übereinstimmen, der den idealen Pfad beschreibt, dem der Roboter folgen muss. Die von RoboDK bereitgestellten Statistiken sind die Differenzen zwischen diesen beiden Pfaden.
Wenn der Referenzrahmen nicht richtig definiert wurde, stimmen die Messpunkte nicht mit dem gelben Pfad überein. Dies kann verschiedene Ursachen haben, z.B. eine fehlerhafte Definition des Bezugssystems oder des Werkzeugs. In diesem Fall wird durch Referenz anpassen versucht, die beiden Pfade am besten anzupassen, so dass in der bereitgestellten Statistik die Fehlausrichtungen isoliert werden.
Resultate
Sobald der Pfadgenauigkeitstest abgeschlossen ist, können Sie einen PDF-Bericht erstellen, indem Sie diese Option im Fenster Pfadvalidierung auswählen. Dies erzeugt ein PDF mit einigen Statistiken und Graphen über die Pfadgenauigkeit, Geschwindigkeit und Beschleunigung.
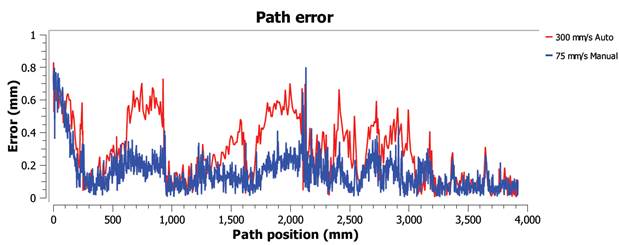
Die Ergebnisse des in den vorherigen Abschnitten vorbereiteten Beispieltests werden in den folgenden Bildern gezeigt. In diesem Beispiel wurde das ISO9283-Programm in zwei verschiedenen Modi ausgeführt:
●Manueller Modus bei 75 mm/s Geschwindigkeit
●Automatik Modus bei 300mm/s Geschwindigkeit

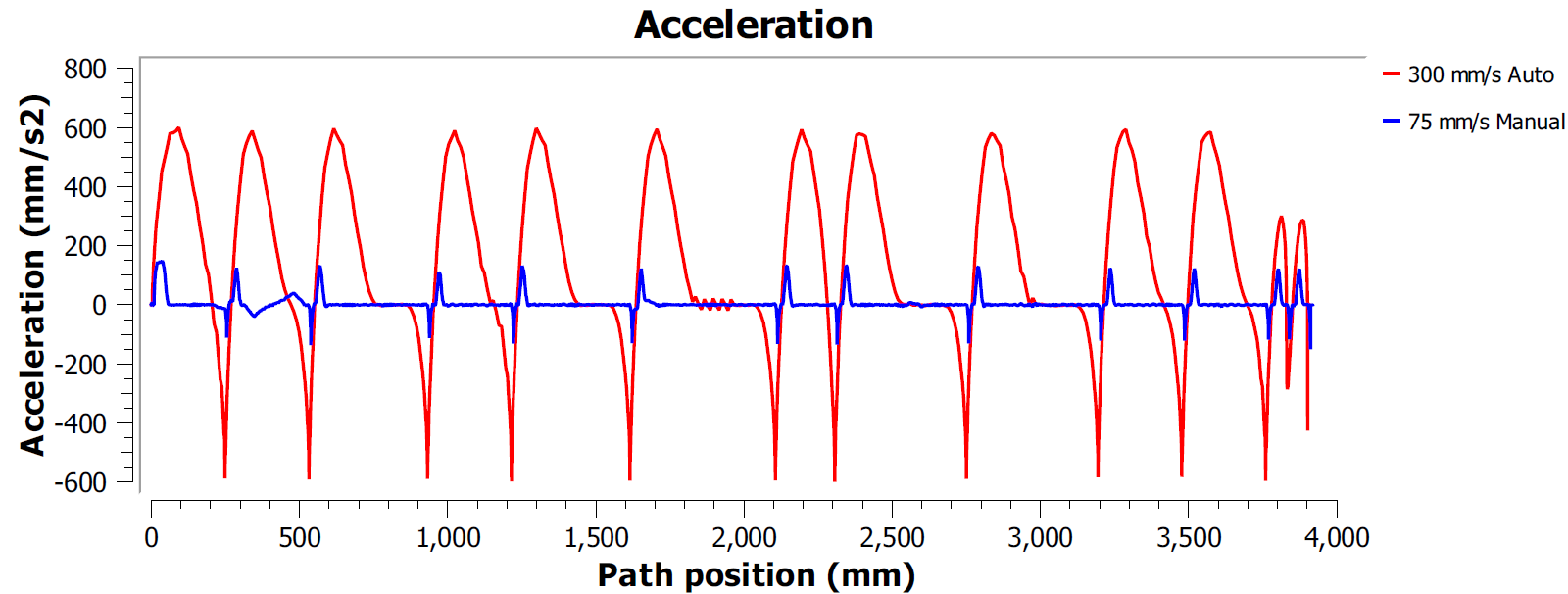
In diesem Beispiel wurden beide Programme mit der Option Feine Genauigkeit erstellt. Dies bedeutet, dass der Roboter an jedem Punkt anhält, um den Weg so genau wie möglich zu absoliveren. In diesem Fall ist es üblich, hohe Beschleunigungen und Verzögerungen entlang des Weges festzustellen, da die Geschwindigkeit am Ende jeder Linien- oder Kreisbewegung Null sein muss.
Die meisten Robotermarken bieten Glättungsoptionen an, um diesen Effekt durch Glätten der Kanten zu vermeiden. Dies nennt ABB beispielsweise ZoneData. Dabei wird die Angabe einer Genauigkeitszone ermöglicht, in der der Controller die Kanten glätten kann, Fanuc nennt es CNT und erlaubt die Angabe eines Prozentsatzes der Glättung proportional zur Geschwindigkeit, KUKA bietet die $ ADVANCE-Anweisung mit dem C_DIS Flag und Universal Robots ermöglicht die Angabe eines Blendradius zum Glätten der Kanten.
Daher ermöglicht der Pfadgenauigkeitstest das Auffinden eines guten Kompromisses zwischen dem Beibehalten einer „glatten“ Geschwindigkeit, während akzeptable Genauigkeitsniveaus in der Nähe der Pfadkanten beibehalten werden.
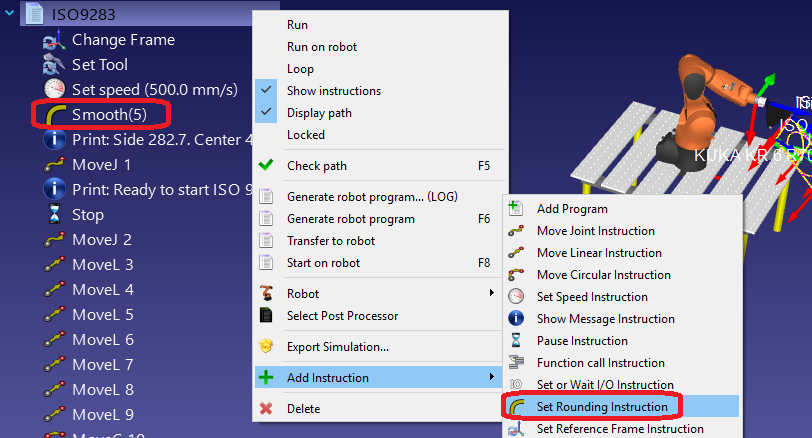
Es ist möglich, den Rundungsparameter sowie die Programmgeschwindigkeit in RoboDK anzugeben. So bearbeiten Sie ein Programm für einen solchen Test:
1.Klicken Sie mit der rechten Maustaste auf das Programm
2.Wählen Sie Anweisungen anzeigen
3.Wählen Sie die erste oder zweite Anweisung
4.Wählen Sie Programm➔Rundungsanweisung einstellen, um eine Rundungsgenauigkeit anzugeben
5.Wählen Sie Programm➔Geschwindigkeitsanweisung einstellen, um die Geschwindigkeit anzugeben