Auslesen des TCP
Die folgenden Schritten erlauben es Roboterwerkzeuge zu erstellen bzw. zu bearbeiten (TCP, oder auch tooldata in der ABB Programmiersprache):
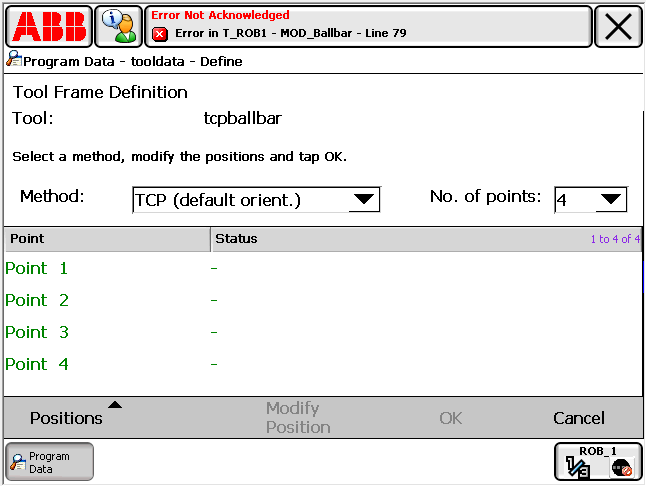
1.Wählen Sie ABB➔Program data➔tooldata (Doppelklick)
2.Ebenfalls ist es möglich bereits bestehend Toolvariablen zu bearbeiten.
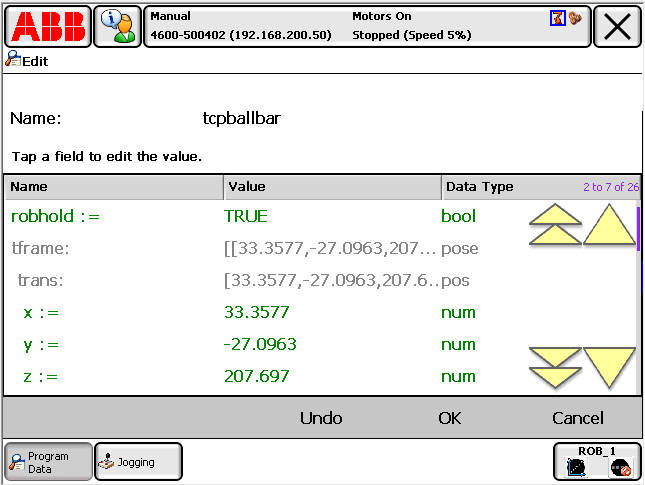
3.Sobald das Werkzeug definiert wurde, können die X,Y,Z Werte des Werkzeugs hergestellt werden.