Geschwindigkeit und Beschleunigung
Informationen zu den maximalen Linear-, Winkel- und Gelenkgeschwindigkeiten/Beschleunigungen der Brooks PreciseFlex-Roboter finden Sie, indem Sie das Web-Interface aufrufen und die folgenden Schritte ausführen:
1.Admin
2.Einrichtung - Parameterdatenbank
3.Roboter
4.Gemeinsame/kartesische Kontrolle
5.Dynamische Parameter
6.DataIDs 2700, 2701, 2702 und 2703
Der Benutzer kann die Eingaben der RoboDK Geschwindigkeits-/Beschleunigungsanweisungen festlegen, indem er die Werte der oben genannten DataIDs als Referenzen verwendet. Der Precise-Postprozessor verwendet dann diese Werte, um die Geschwindigkeit/Beschleunigung als Prozentsatz der maximalen Geschwindigkeit/Beschleunigung für jeden Roboter zu berechnen, wie von der GPL-Profilklasse gefordert.
Um die vom Postprozessor verwendeten Grenzwerte zu ändern, können Sie den Postprozessor entsprechend dem von Ihnen verwendeten Roboter anpassen. Standardmäßig verwendet der Postprozessor die Grenzwerte der PF400- und PF3400-Roboter. Lesen Sie den Abschnitt https://robodk.com/doc/en/Post-Processors.html#PPEditor in der Dokumentation, um den Postprozessor zu ändern.
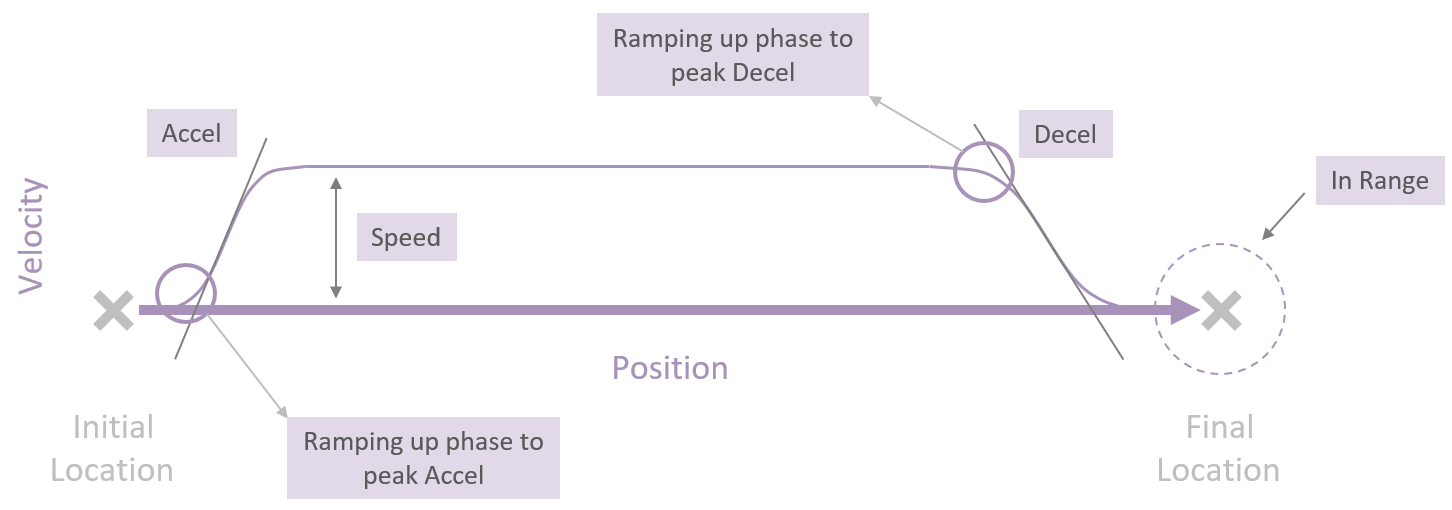
Wenn bei linearen und Winkelbeschleunigungsanweisungen Eingabewerte kleiner als 1 verwendet werden, werden diese Eingaben als Dauer in Sekunden für das Hochfahren auf die Spitzenbeschleunigung/-verzögerung verwendet (GPL-Code: prof1.AccelRamp/prof1.DecelRamp = inputvalue).
Die folgende Abbildung enthält weitere Informationen zu den oben beschriebenen Konzepten und dazu, wie die Steuerung die Bahnen plant, denen der Roboter folgen muss.