Postprozessor
In diesem Abschnitt finden Sie einige Tipps zur Erstellung von Programmen für Brooks-Roboter.
Tool Center Point (TCP)
Der Tool Center Point (TCP) in RoboDK und in der Steuerung muss übereinstimmen. Wenn Sie einen Greifmechanismus verwenden, müssen Sie mit "Werkzeug hinzufügen (TCP)" einen TCP hinzufügen, der sich an der erwarteten Position befindet. Der TCP des neuen Werkzeugs sollte mit dem TCP des Greifmechanismus übereinstimmen. Informationen zum Tool Center Point (TCP) des Brooks PreciseFlex Roboters finden Sie, indem Sie das Webinterface aufrufen und die folgenden Schritte ausführen:
1.Admin
2.Einrichtung - Parameterdatenbank
3.Roboter
4.Gemeinsame/kartesische Kontrolle
5.Dynamische Parameter
6.DataID 16051
Greifer
Im vorherigen Abschnitt Greifersimulation erfahren Sie, wie Sie die mit dem Postprozessor kompatiblen Greiferanweisungen richtig definieren. Auf diese Weise werden die Positionen im GPL-Projekt richtig definiert und unerwartete Bewegungen der Greiferachse(n) vermieden.
Rundung
Ein Eingabewert von -1 bedeutet, dass der Roboter am Ende der Bewegung anhält und eine strenge Positionsfehlerbeschränkung angewendet wird (GPL-Code: prof1.InRange = 100).
Ein Eingabewert von 0 bedeutet, dass der Roboter am Ende der Bewegung anhält, aber eine kleine Positionsfehlerbeschränkung angewendet wird (GPL-Code: prof1.InRange = 10).
Ein Eingabewert größer als 0 bedeutet, dass der Roboter am Ende der Bewegung nicht anhält und eine gemischte Bewegung ausgeführt wird (GPL-Code: prof1.InRange = -1).
Geschwindigkeit und Beschleunigung
Informationen zu den maximalen Linear-, Winkel- und Gelenkgeschwindigkeiten/Beschleunigungen der Brooks PreciseFlex-Roboter finden Sie, indem Sie das Web-Interface aufrufen und die folgenden Schritte ausführen:
1.Admin
2.Einrichtung - Parameterdatenbank
3.Roboter
4.Gemeinsame/kartesische Kontrolle
5.Dynamische Parameter
6.DataIDs 2700, 2701, 2702 und 2703
Der Benutzer kann die Eingaben der RoboDK Geschwindigkeits-/Beschleunigungsanweisungen festlegen, indem er die Werte der oben genannten DataIDs als Referenzen verwendet. Der Precise-Postprozessor verwendet dann diese Werte, um die Geschwindigkeit/Beschleunigung als Prozentsatz der maximalen Geschwindigkeit/Beschleunigung für jeden Roboter zu berechnen, wie von der GPL-Profilklasse gefordert.
Um die vom Postprozessor verwendeten Grenzwerte zu ändern, können Sie den Postprozessor entsprechend dem von Ihnen verwendeten Roboter anpassen. Standardmäßig verwendet der Postprozessor die Grenzwerte der PF400- und PF3400-Roboter. Lesen Sie den Abschnitt https://robodk.com/doc/en/Post-Processors.html#PPEditor in der Dokumentation, um den Postprozessor zu ändern.
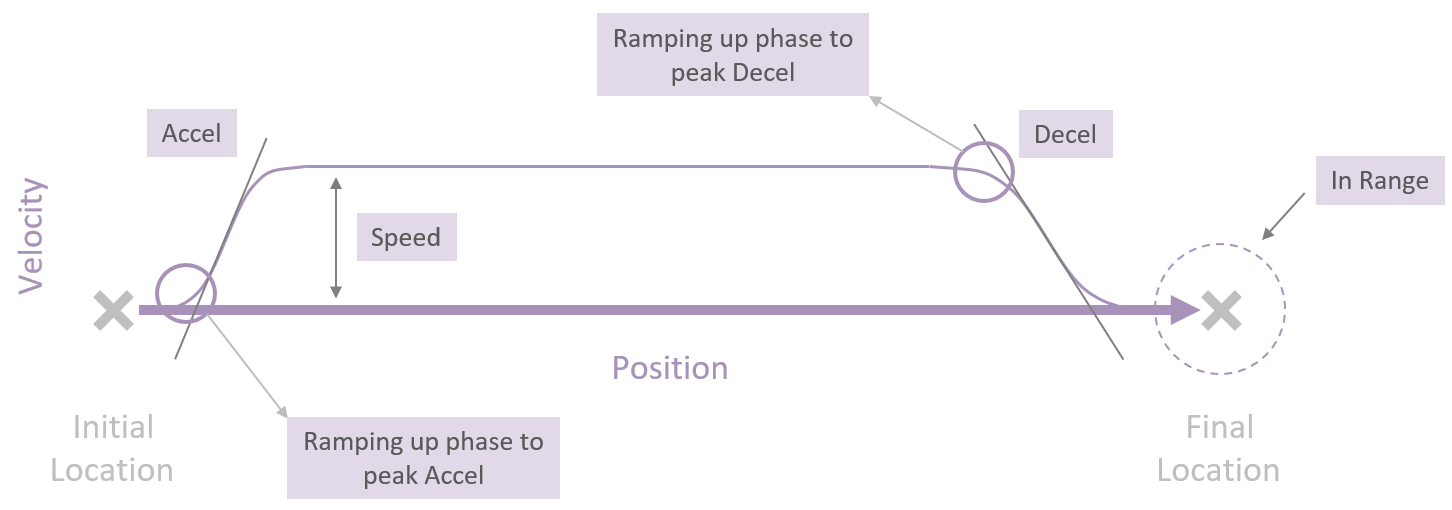
Wenn bei linearen und Winkelbeschleunigungsanweisungen Eingabewerte kleiner als 1 verwendet werden, werden diese Eingaben als Dauer in Sekunden für das Hochfahren auf die Spitzenbeschleunigung/-verzögerung verwendet (GPL-Code: prof1.AccelRamp/prof1.DecelRamp = inputvalue).
Die folgende Abbildung enthält weitere Informationen zu den oben beschriebenen Konzepten und dazu, wie die Steuerung die Bahnen plant, denen der Roboter folgen muss.
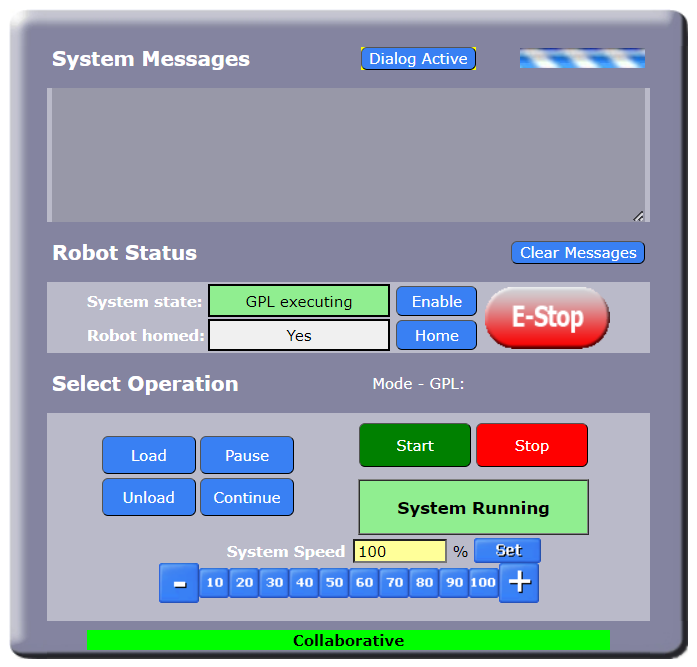
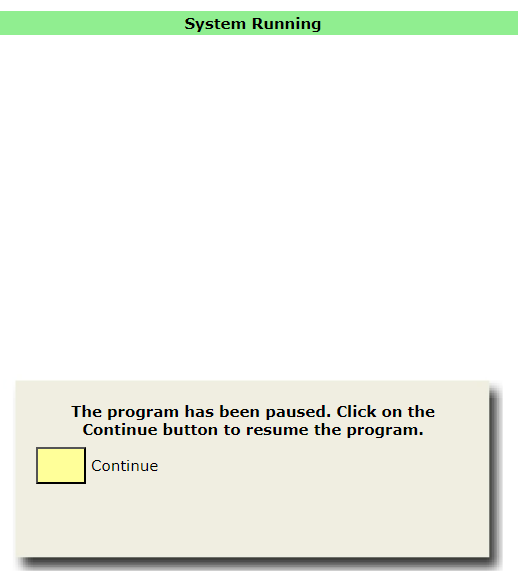
Pause
Wenn Sie einen Eingabewert größer als 0 eingeben, wird ein GPL-Befehl generiert, der das Programm für die durch den Eingabewert definierte Zeit unterbricht. Ein negativer Eingabewert öffnet ein Popup-Dialogfeld in der Webschnittstelle Operator Control Panel und das Programm wird angehalten, bis der Benutzer auf die Schaltfläche "Weiter" im Dialogfeld klickt. Um das Dialogfeld zu visualisieren, muss der Benutzer auf die Schaltfläche "Dialog aktiv" im Bedienfeld klicken.