Comau-Roboter
Dieser Abschnitt der Dokumentation bietet einen Überblick über typische Vorgänge bei der Verwendung eines Comau Roboters, wie z.B. das Erstellen von Programmen aus RoboDK und das Laden in die Comau Robotersteuerung.
Übertragen eines Roboterprogramms
In diesem Abschnitt erfahren Sie, wie Sie ein Programm in die Comau Robotersteuerung laden.
Gehen Sie folgendermaßen vor, um ein Programmformular über FTP in den Programmspeicher zu laden.
1.Konfigurieren Sie unter der Registerkarte "Verbindung" für den Roboter die IP-Adresse korrekt. Wenn der FTP-Benutzername und das FTP-Passwort nicht die Standardwerte sind, können Sie sie unter "Weitere Optionen" konfigurieren.
2.Wenn Sie ein Programm übertragen möchten, klicken Sie einfach mit der rechten Maustaste auf das Programm und wählen Sie "An Roboter senden".
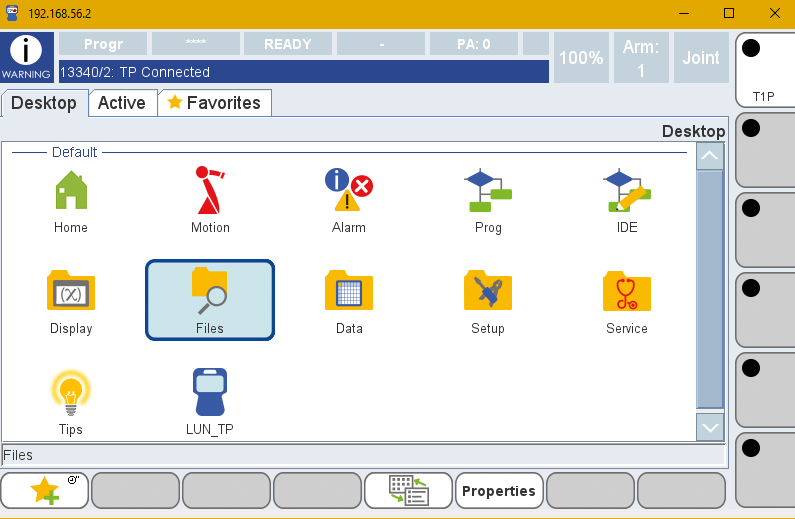
3.Navigieren Sie auf der Robotersteuerung zu "Dateien" im Hauptmenü der Programmierhandgeräte
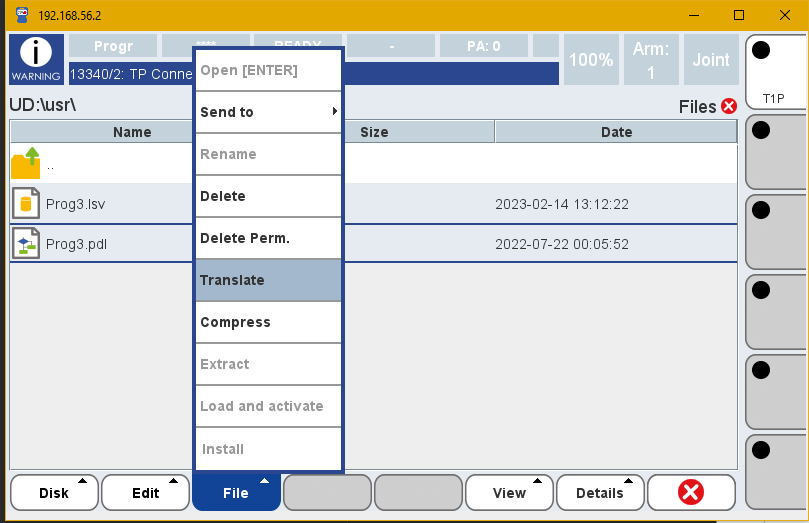
4.Wählen Sie das PDL-Programm und ggf. die entsprechende LSV aus und klicken Sie auf Datei->Übersetzen, um das Programm in die entsprechende kompilierte Version zu konvertieren.
5.Die kompilierten Dateien können nun in den Speicher geladen und über die Option "Prog" auf der Hauptschnittstelle ausgeführt werden
Wenn Sie RoboDK mit einem virtuellen Roboter in RoboShop verwenden, sollten Sie die maximale Anzahl der gleichzeitigen FTP-Verbindungen erhöhen, da sonst das virtuelle Teach-Pendant jedes Mal die Verbindung trennt, wenn Sie eine Datei übertragen. Dies können Sie erreichen, indem Sie ein Terminal auf dem virtuellen Roboter öffnen und die folgenden Aktionen durchführen.
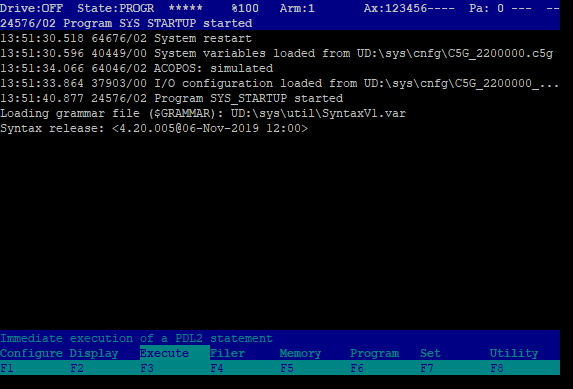
Navigieren Sie zu dem Terminal in Roboshop und führen Sie die folgenden Schritte im Terminal des Roboters aus:,
1.Wählen Sie Ausführen (F3)
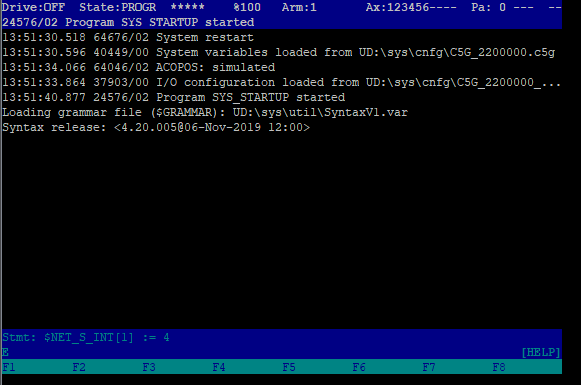
2.Geben Sie "$NET_S_INT[1] := 4" ein.
3.Drücken Sie "Enter", um die Anweisung zu bestätigen.
4.Drücken Sie ein zweites Mal "Enter", um die Anweisung auszuführen.
Postprozessor
Bei der Erstellung von Roboterprogrammen für Comau-Roboter ist es wichtig zu überprüfen, ob Ihr Roboter für MODAL- oder NODAL-Programme konfiguriert ist.
Für Nodal-Programme wählen Sie die folgenden Postprozessoren aus, indem Sie mit der rechten Maustaste auf den Roboter und dann auf die Schaltfläche "Postprozessor auswählen" klicken
●Comau Nodal
Bei modalen Programmen wählen Sie die folgenden Postprozessoren aus, indem Sie mit der rechten Maustaste auf den Roboter und dann auf die Schaltfläche "Postprozessor auswählen" klicken:
●Comau C5G
●Comau C5G Gelenke
Driver
Sie können die Online-Programmierfunktionen mit Comau-Robotern verwenden. Damit die Online-Programmierfunktionen funktionieren, müssen Sie den Treiber auf der Seite der Comau-Robotersteuerung einrichten, indem Sie die PDL-Programmdatei des Treibers ausführen.
Hinweis: Laden Sie den RoboDK-Treiber für Comau Robotersteuerungen herunter.
Folgen Sie diesen Anweisungen, um den Comau-Treiber für RoboDK einzurichten:
1.Übertragen Sie die Datei RoboDKdriver.pdl auf die Comau Robotersteuerung.
2.Starten Sie das Programm manuell auf dem Roboter (verwandelt den Roboter in einen Server).
3.Verbinden Sie sich über RoboDK mit dem Roboter.
Der standardmäßig verwendete Kommunikationsport ist 1102. Sie können ihn jedoch in der Datei RoboDKdriver.pdl ändern.