Programme vom PC ausführen
Roboterprogramme können direkt von RoboDK auf dem echten Roboter ausgeführt werden, wenn eine Netzwerkverbindung hergestellt wurde.
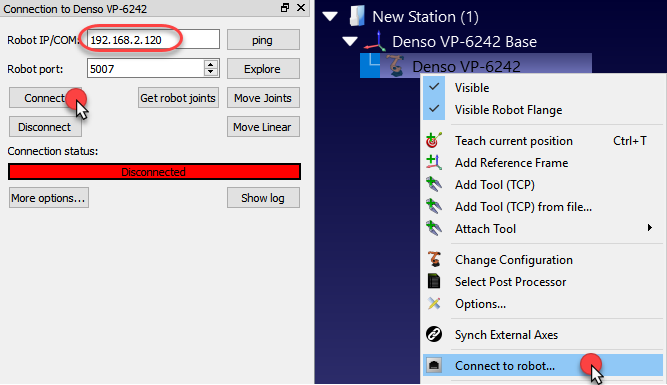
1.Klicken Sie mit der rechten Maustaste auf den Roboter in RoboDK
2.Wählen Sie aus: 
3.Geben Sie die IP des Roboters ein
4.Wählen Sie Verbinden.
Wenn die Verbindung erfolgreich hergestellt wurde, sollte die grüne Meldung Bereit angezeigt werden.
Sie können den Roboter bewegen, indem Sie im Verbindungsmenü Robotergelenke holen, Gelenke bewegen und Linear bewegen auswählen.
Hinweis: Lesen Sie den vorherigen Abschnitt, um den b-Cap Server auf der Robotersteuerung zu aktivieren, um diese Kommunikation zu ermöglichen.
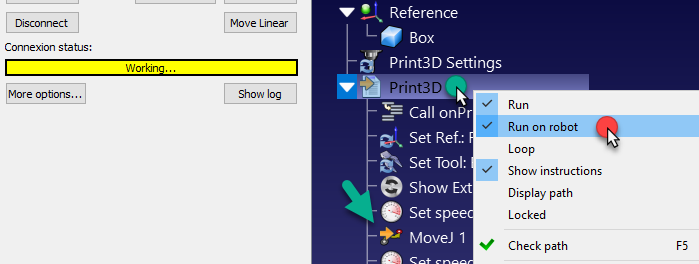
Verwenden Sie die Option Beim Roboter ausführen, um den Roboter zu bewegen und dabei das Feedback in RoboDK (Online-Programmierung) beizubehalten. Bei dieser Methode wird der Roboter als Server verwendet und jede Anweisung wird Schritt für Schritt an den Roboter gesendet, während sie im Simulator ausgeführt wird. Diese Methode ist für Debugging-Zwecke nützlich.
1.Klicken Sie mit der rechten Maustaste auf das Programm (Print3D, wie auf dem folgenden Bild gezeigt)
2.Wählen Sie Auf Roboter ausführen
3.Doppelklicken Sie auf das Programm, um es zu starten (oder klicken Sie mit der rechten Maustaste und wählen Sie Ausführen)
Wenn diese Option aktiviert ist, wird jedes Mal, wenn wir auf ein Programm doppelklicken (oder mit der rechten Maustaste klicken und dann Ausführen wählen), eine Verbindung zum echten Roboter hergestellt.
Diese Operationen sind auch über die RoboDK API verfügbar und ermöglichen die Integration der Roboterprogrammierung in andere Anwendungen. Die API ist in Python, C# und anderen Programmiersprachen verfügbar.