RoboDK Treiber für Denso
Der RoboDK-Treiber für Denso kann stark angepasst werden, um ein bestimmtes Verhalten zu erreichen. Diese Anpassung kann durch Bearbeiten der ini-Datei erfolgen, die sich in:
%APPDATA%/RoboDK-Treiber-Denso/apidenso.exe.ini
Diese Anpassungen ermöglichen es, die Art der Bewegungen festzulegen oder mehr als einen Roboter gleichzeitig zu steuern. Sie können diese Datei mit einem beliebigen Texteditor bearbeiten.
Hinweis: Den Ordner %APPDATA% erreichen Sie durch Eingabe von %APPDATA% im Navigationspfad.
Hinweis: Löschen Sie diese Datei und versuchen Sie erneut, sich mit dem Roboter zu verbinden, um die Standardeinstellungen zu generieren.
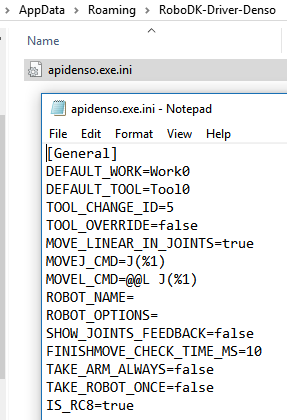
Die folgenden Variablen können konfiguriert werden:
●DEFAULT_WORK - Standardmäßig verwendetes Arbeitsobjekt (variable Zeichenfolge).
●DEFAULT_TOOL - Standardmäßig verwendete Werkzeugvariable.
●TOOL_CHANGE_ID - Ersatzwerkzeugvariable, die verwendet wird, wenn wir ein neues Werkzeug setzen (z.B. 5=Tool5).
●MOVE_LINEAR_IN_JOINTS - Setzen Sie diese Option auf false, um lineare Bewegungen als kartesische Ziele bereitzustellen.
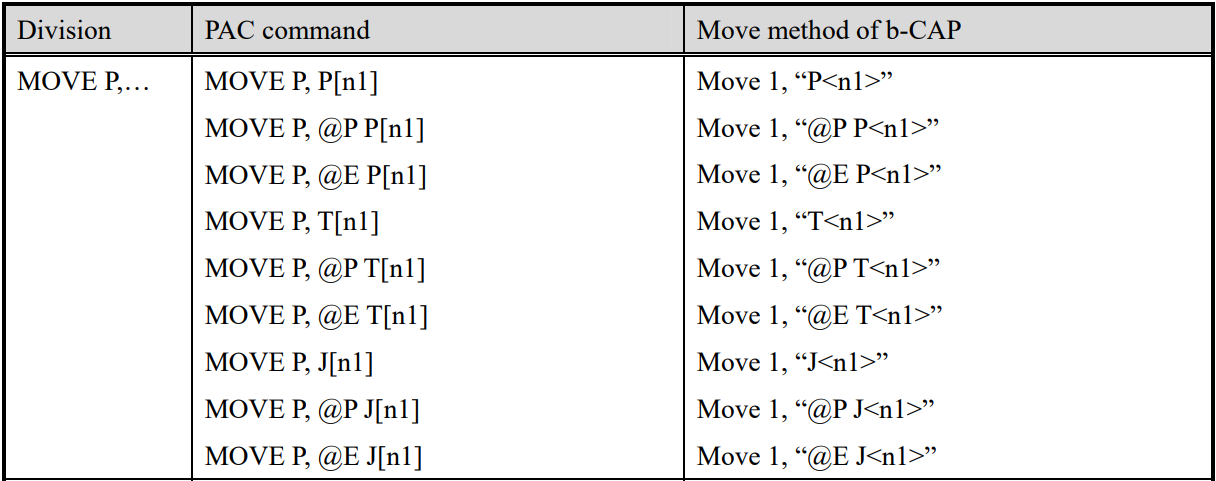
●MOVEJ_CMD - Zu sendender Befehl für eine gemeinsame Bewegung (MoveJ). Die folgende Tabelle enthält die zulässigen Optionen.
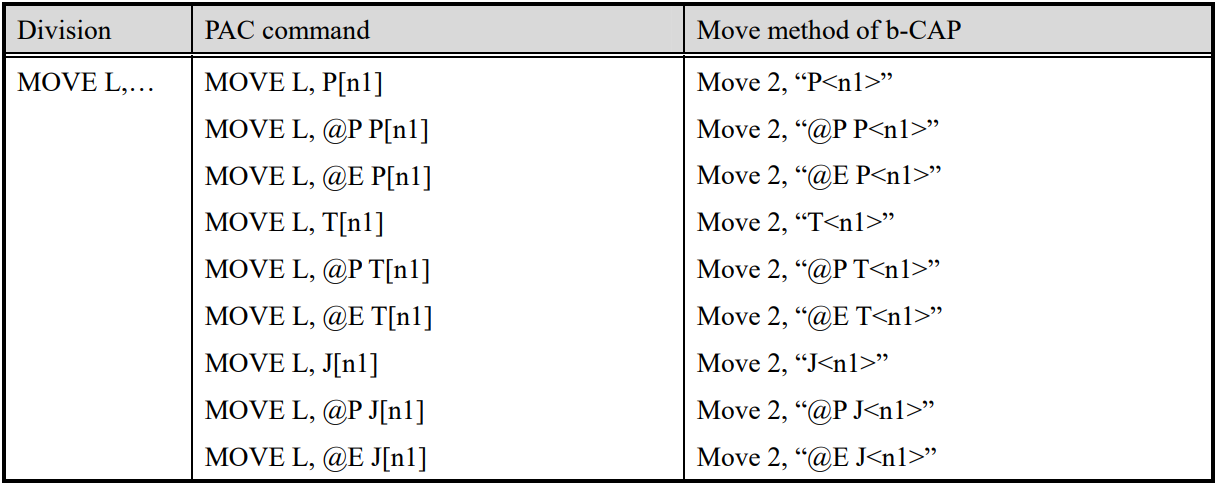
●MOVEL_CMD - Zu sendender Befehl für eine lineare Bewegung (MoveL). Die folgende Tabelle enthält die zulässigen Optionen.
Wichtig! Ein @-Zeichen sollte zweimal in der INI-Datei vorkommen. Das @-Zeichen bedeutet, dass die Bewegung gerundet wird.
●ROBOT_NAME - Name des Roboters. Geben Sie diesen Namen an, um einen bestimmten Roboter einer Steuerung auszuwählen.
●ROBOT_OPTIONS - Roboteroptionen, um die Roboterressourcen zu erhalten. Wenn wir zum Beispiel den Slave-Roboter der Steuerung verwenden, müssen wir ROBOT_OPTIONS="ID=1" angeben. ID muss 0 sein (Standard), wenn wir den Master-Roboter (Hauptroboter) verwenden möchten.
●SHOW_JOINTS_FEEDBACK - Setzen Sie diese Option auf true, um das Feedback des Roboters in Echtzeit auf dem Bildschirm zu sehen (die Leistung kann langsamer sein).
●FINISH_MOVE_CHECK_MS - Legen Sie fest, wie schnell die Position des Roboters auf dem Bildschirm aktualisiert werden soll, wenn das Feedback der Gelenke angezeigt wird.
●TAKE_ARMS_ALWAYS - Setzen Sie diese Option auf true, damit die Controller-Ressourcen nach jeder Bewegung erhalten bleiben, bis der Roboter abgekoppelt wird (schneller, aber es kann zu unerwarteten Ergebnissen führen).
●TAKE_ROBOT_ONCE - Setzen Sie diese Option auf true, um die Roboterressource nach jeder Bewegung zu behalten, während der Roboter verbunden ist (schneller, aber es kann zu unerwarteten Ergebnissen führen).
●IS_RC8 - Setzen Sie diese Option auf false, um eine korrekte Verbindung zu RC7 und älteren Denso-Controllern herzustellen.
Hinweis: Sobald die Datei geändert wurde. Doppelklicken Sie auf Trennen und wählen Sie erneut Verbinden, um die neuen Änderungen zu übernehmen. Die folgende Abbildung zeigt die Standardwerte.