Erhalten der Achswinkel
Um die aktuellen Achswinkel zu erhalten, müssen Sie diesen Schritten folgen:
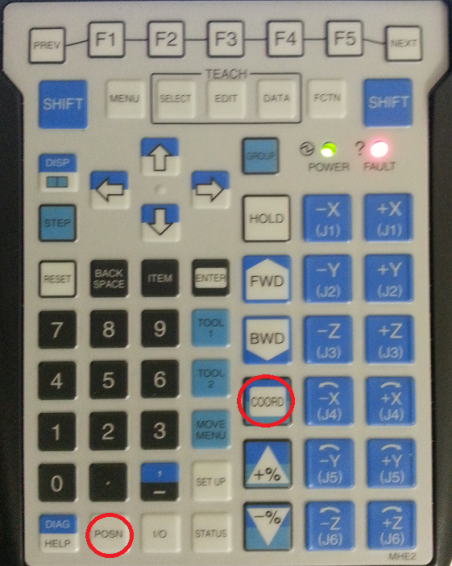
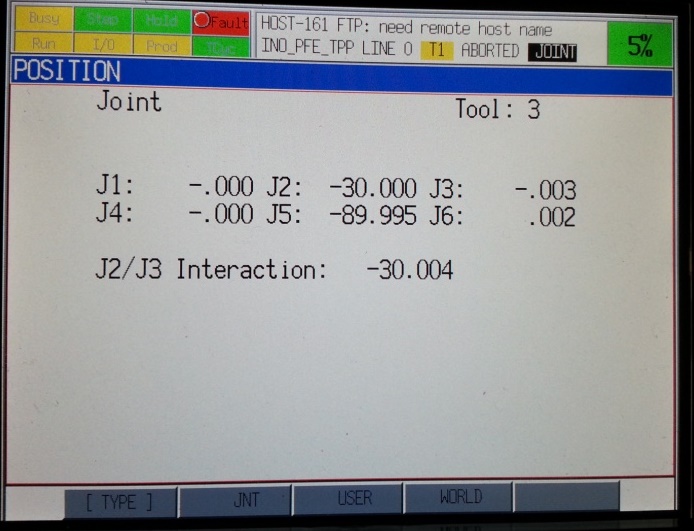
1.Wählen Sie POSN (Handprogrammiergerät) um die aktuelle Roboterposition zu sehen
2.Wählen Sie COORD (Handprogrammiergerät) um den achsspezifischen Modus zu wählen