Übertragen eines Programms
Sie müssen den folgenden Schritt folgen, um ein Programm von einem USB Speicher zu laden:
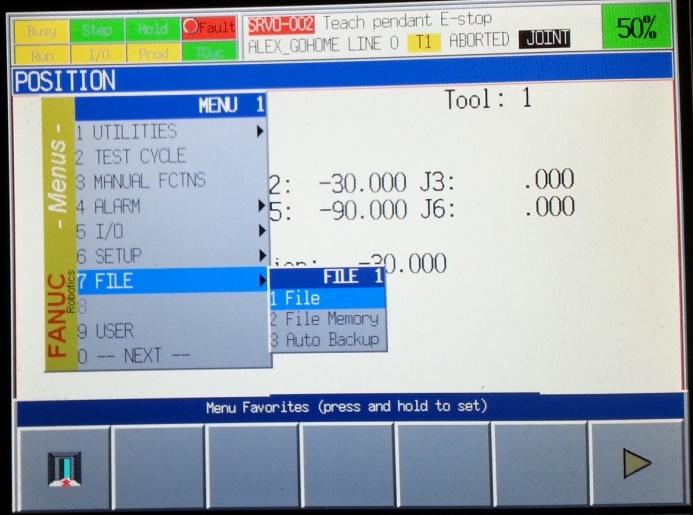
1.Wählen Sie MENU➔File
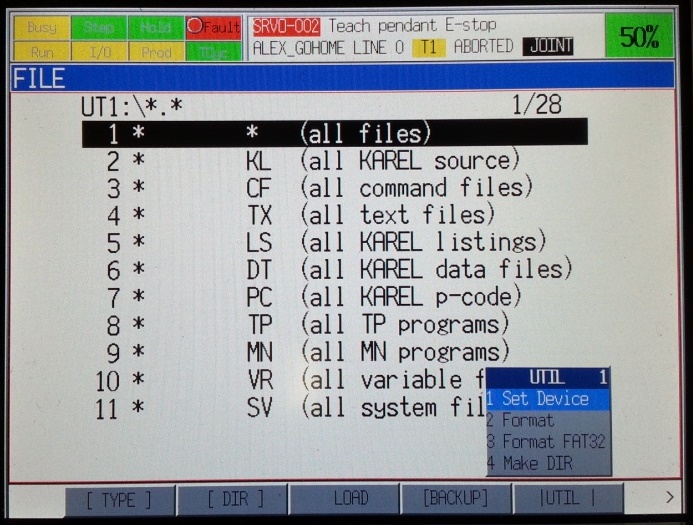
2.Wählen Sie Utilities➔Select Device➔USB
3.Wählen Sie DIR
4.Wählen Sie das TP oder das LS Programm vom USB Speicher (z.B. BALLBARTEST.TP)
Dies speichert die Datei automatisch in den FR Speicher des Controllers
5.Wählen Sie das Programm im FR Speichern und wählen Sie LOAD (Bildschirm Knopf)
Wichtig: Die Option ASCII Upload wird für die Offline Programmierung benötigt. Diese erlaubt das direkte Laden von LS Dateien auf den Controller. Alternativ können LS Programme (ASCII Dateien) in TP Programme (binäre Dateien) vom PC aus mittels Fanucs WinOLPC Werkzeug (MaketTP) kompiliert werden.
Wichtig: Die Lineargeschwindigkeit eines von RoboDK erstellten Programms wird standardmäßig im Register [R10] definiert. Wenn die Geschwindigkeit nicht im Programm eingestellt wird, muss dies manuell geschehen. In diesem Fall:
Wählen Sie: DATEN➔Typ➔Register, R[10]=50 (entspricht einer Geschwindigkeit von 50 mm/s)
Wählen Sie: DATEN➔Typ➔Register, R[10]=50 (entspricht einer Geschwindigkeit von 50 mm/s)