Han's Roboter
Dieser Abschnitt der Dokumentation gibt einen Überblick über den typischen Betrieb von Han's Robotern, die RoboDK verwenden, um ein Programm an die Han-Steuerung zu senden.
Übertragen Sie ein Programm auf den Controller des Han
Sie können von RoboDK erstellte Roboterprogramme manuell in die Robotersteuerung Ihres Han importieren.
Gehen Sie folgendermaßen vor, um ein RoboDK-Programm in Han's Controller zu importieren:
1.Starten Sie den Controller des Han und verbinden Sie sich mit dem Roboter.
2.Klicken Sie in RoboDK mit der rechten Maustaste auf das Programm, das Sie importieren möchten, und wählen Sie Roboterprogramm generieren als....
3.RoboDK fordert Sie auf, zwei Dateien zu speichern. Die eine ist ein zeilenweises Skript mit den Befehlen, die an die Steuerung gesendet werden, die andere eine .json-Datei, die auf die Steuerung hochgeladen wird.
4.Wählen Sie den Ort, an dem Sie die einzelnen Dateien speichern möchten. Die .json-Datei kann auf einem USB-Datenträger gespeichert werden, um sie als Programm in den Controller zu importieren.
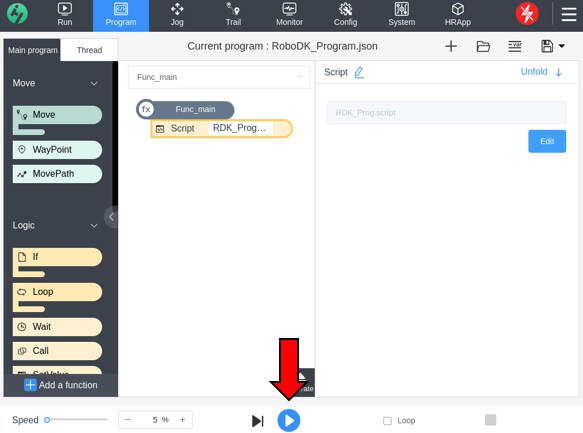
5.Navigieren Sie in der Steuerung zur Registerkarte Programm.
6.Rechts neben dem Namen "Aktuelles Programm" befindet sich ein Ordnersymbol. Wählen Sie dieses Symbol, um die Liste der Programmdateien zu öffnen.
7.Wählen Sie die Schaltfläche "Importieren" am Ende der Liste.
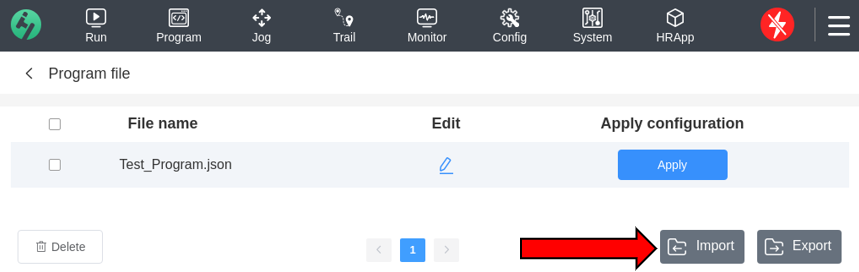
8.Suchen Sie die von RoboDK erzeugte .json-Datei auf dem USB-Stick und wählen Sie sie aus.
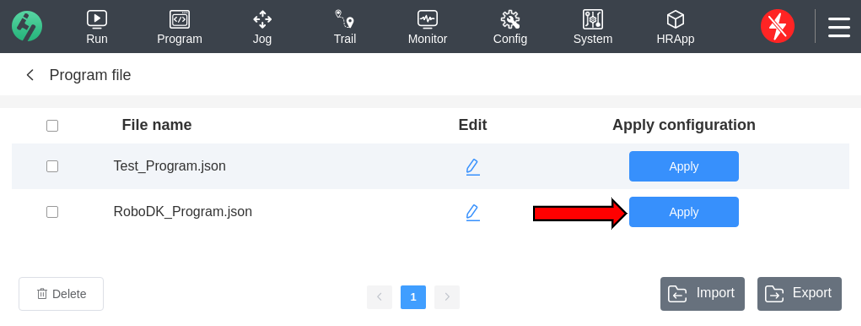
9.Klicken Sie auf "Übernehmen", um das importierte Programm als aktives Programm festzulegen.
10.Das RoboDK-Programm wird als eine Funktion importiert, die ein Skript aufruft.
11.Wählen Sie die blaue Starttaste, um das Programm auf dem Roboter auszuführen.