Hanwha-Roboter
RoboDK unterstützt alle Hanwha Robotersteuerungen. Sie können Simulationen und Roboterprogramme für Hanwha erstellen und Sie können auch den echten Hanwha-Roboter von RoboDK aus mit dem Treiber bewegen.
Hinweis: Unterstützung für Hanwha-Roboter wird bei Verwendung der Rodi Software Version 2.001.003.012 oder höher angeboten. Kontaktieren Sie uns für den Treiber und das RoboDK für Hanwha Plugin.
Hinweis: Sie können Programme offline erstellen, ohne den Treiber zu verwenden.
RoboDK Treiber für Hanwha
Robotertreiber bieten eine Alternative zur Offline-Programmierung. Mit den Hanwha-Treibern können Sie einen Roboter direkt von RoboDK aus bewegen, während Sie Ihr Programm simulieren (Online-Programmierung). Weitere Informationen finden Sie im Abschnitt Robotertreiber.
Folgen Sie den nachstehenden Schritten, um RoboDK für die Zusammenarbeit mit Hanwha-Robotern zu konfigurieren.
Schritt 1. Einrichten der IP-Adresse des Roboters
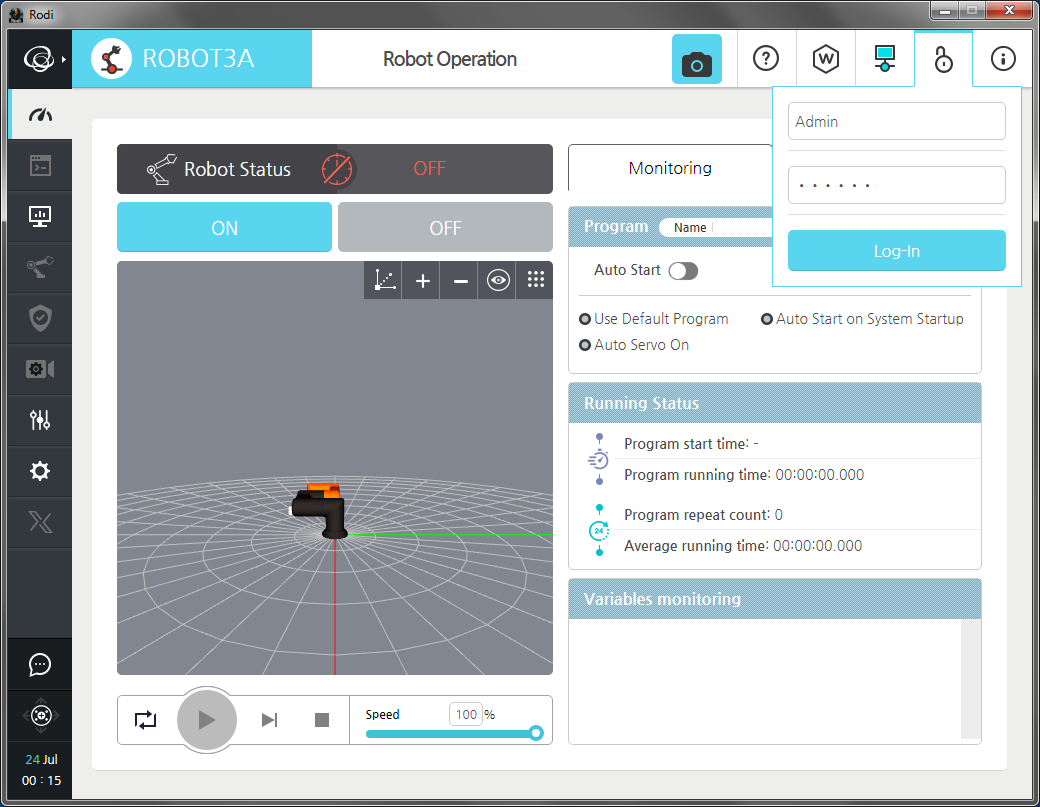
1.Melden Sie sich als Administrator an
Hinweis: Das Kontrollsystem verwendet standardmäßig die folgenden Konten: login Admin mit Passwort 170502. Oder login user mit dem Kennwort hcr5. Das Benutzerkonto hat standardmäßig administrative Rechte.
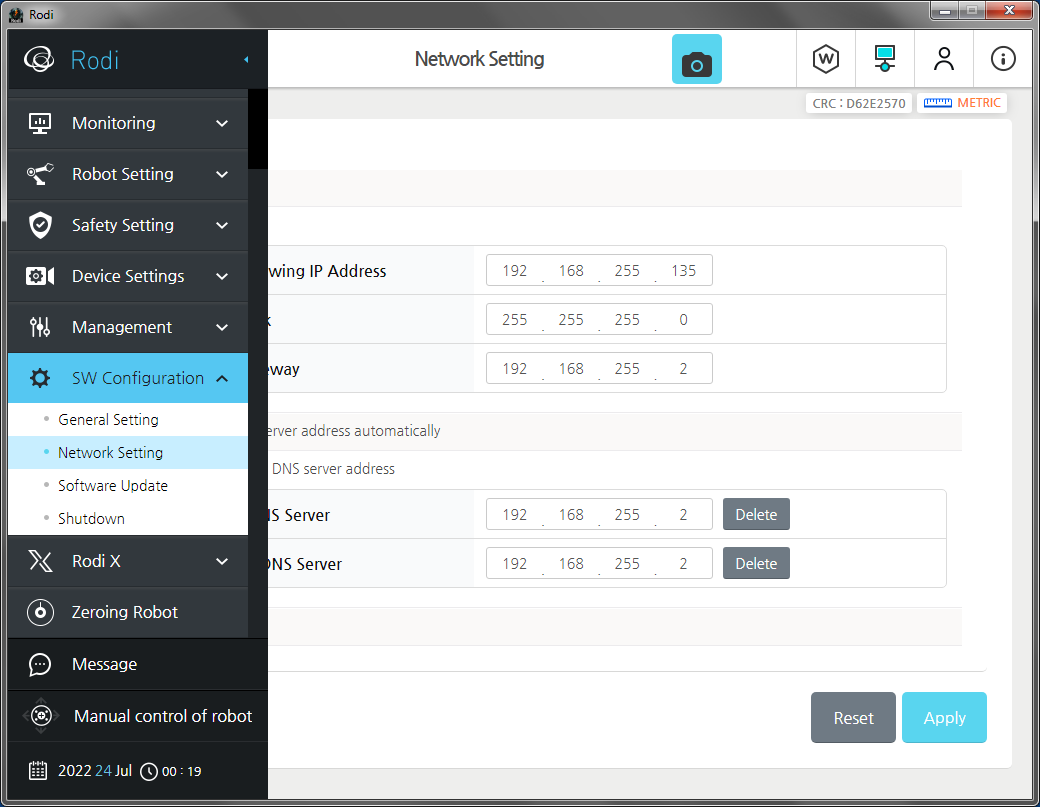
2.Öffnen Sie SW Konfiguration⇒ Netzwerkeinstellungen und geben Sie die Parameter Ihres lokalen Netzwerks ein, insbesondere die IP-Adresse und die Subnetzmaske. Klicken Sie auf Übernehmen und stimmen Sie einem Neustart zu, wenn das System Sie dazu auffordert.
Schritt 2. Installieren Sie das RoboDK Connector Plug-in
1.Melden Sie sich als Administrator an
2.Bereiten Sie einen USB-Stick mit der Datei RoboDK.asar vor und schließen Sie ihn an die Robotersteuerung oder das Programmierhandgerät an.
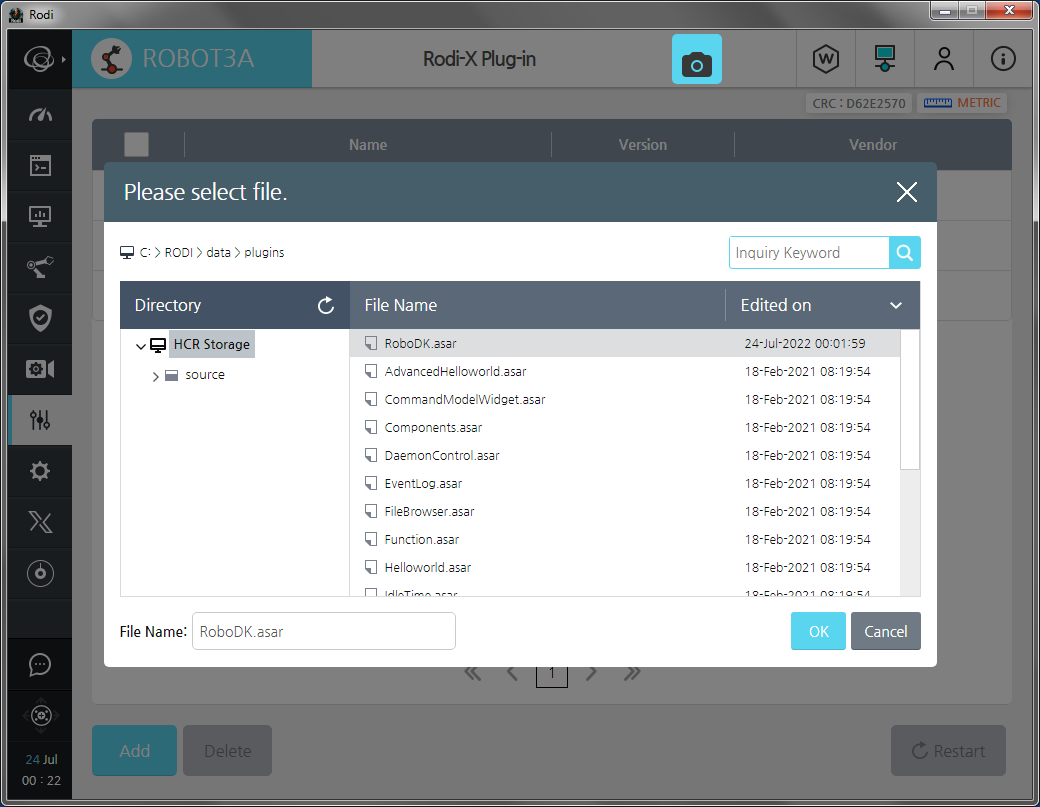
3.Öffnen Sie das Management⇒ Rodi-X Plug-in und klicken Sie auf die Schaltfläche Hinzufügen, um den Dialog Datei auswählen zu öffnen.
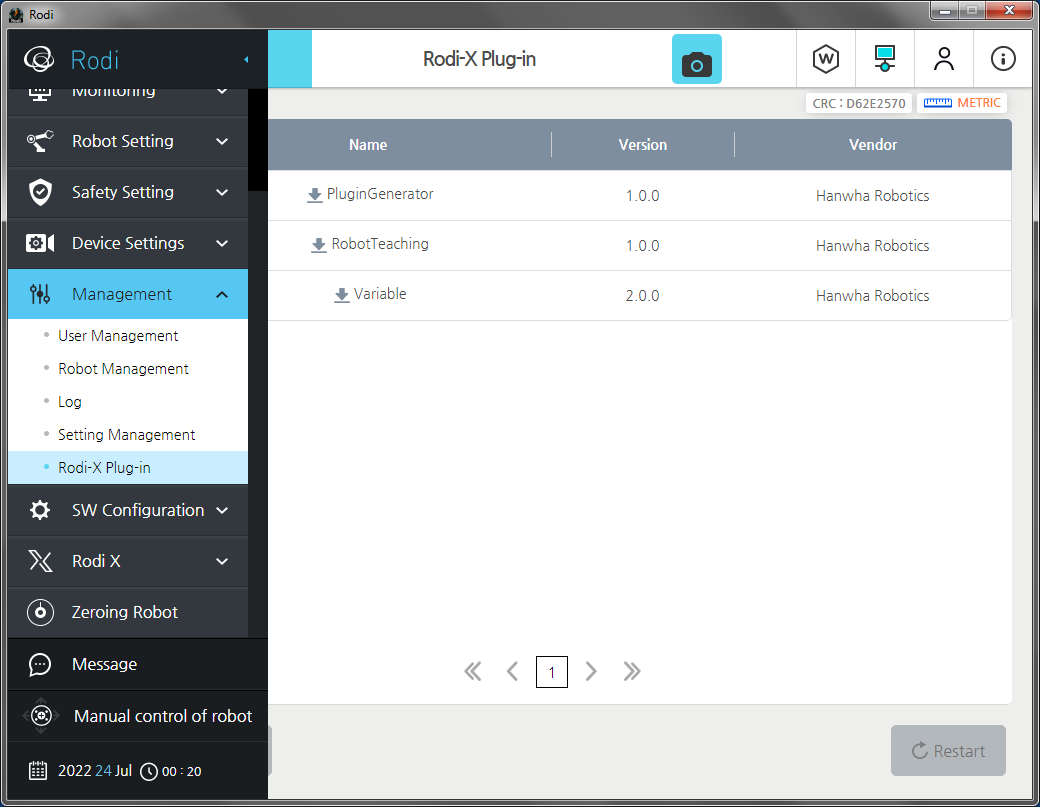
4.Wählen Sie RoboDK.asar und klicken Sie auf OK.
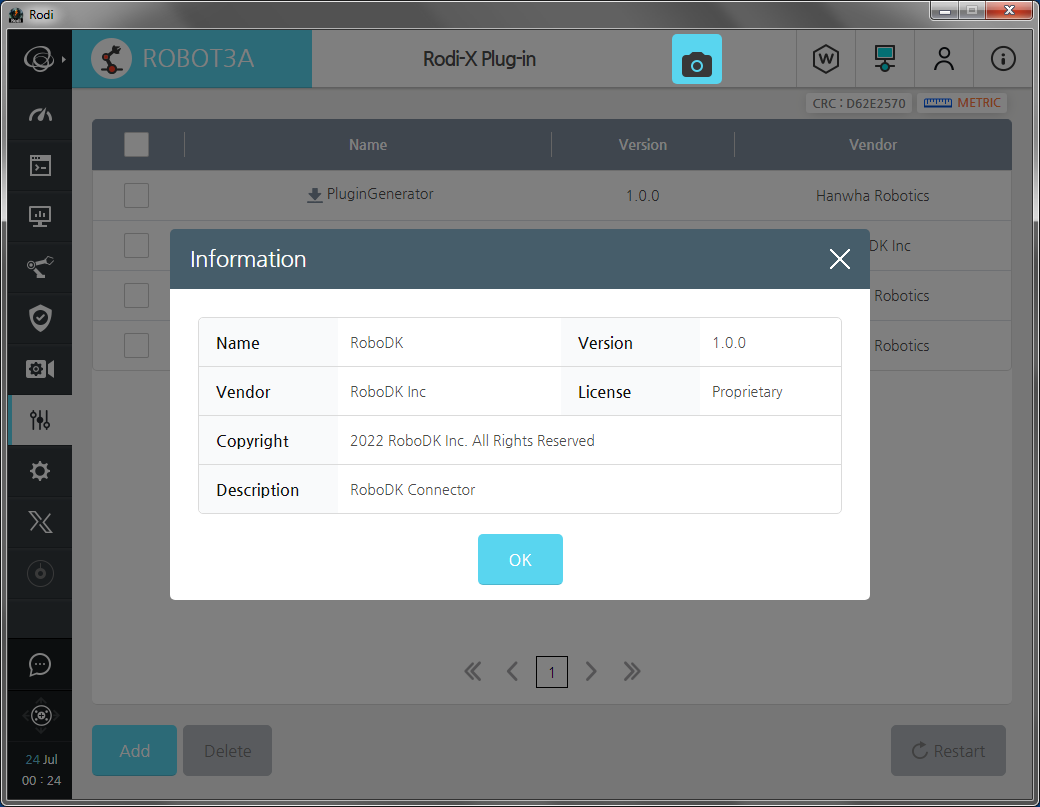
5.Drücken Sie die Taste Neustart.
6.Nach dem Neuladen sehen Sie Informationen über das Plugin.
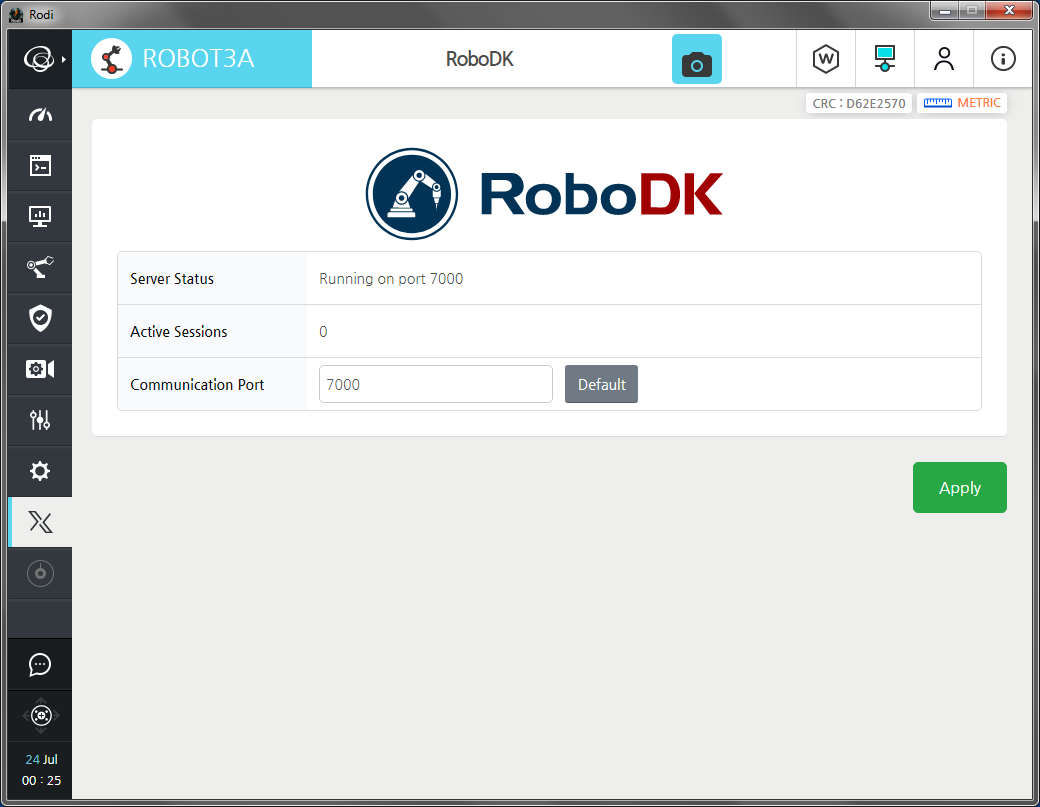
7.Öffnen Sie Rodi X⇒ RoboDK und vergewissern Sie sich, dass das Feld Serverstatus keine Fehlermeldungen enthält. Wenn der Port TCP 7000 von einer anderen Anwendung belegt zu sein scheint, können Sie ihn ändern, indem Sie einen anderen Wert in das Feld Kommunikationsport eingeben und auf Übernehmen klicken.
8.Jetzt ist der Roboter bereit für die Fernsteuerung.
Schritt 3. Einrichten der RoboDK-Verbindung
1.Richten Sie Ihr RoboDK-Projekt ein und fügen Sie einen der Hanwha-Roboter darin ein. Zum Beispiel den HCR-3.
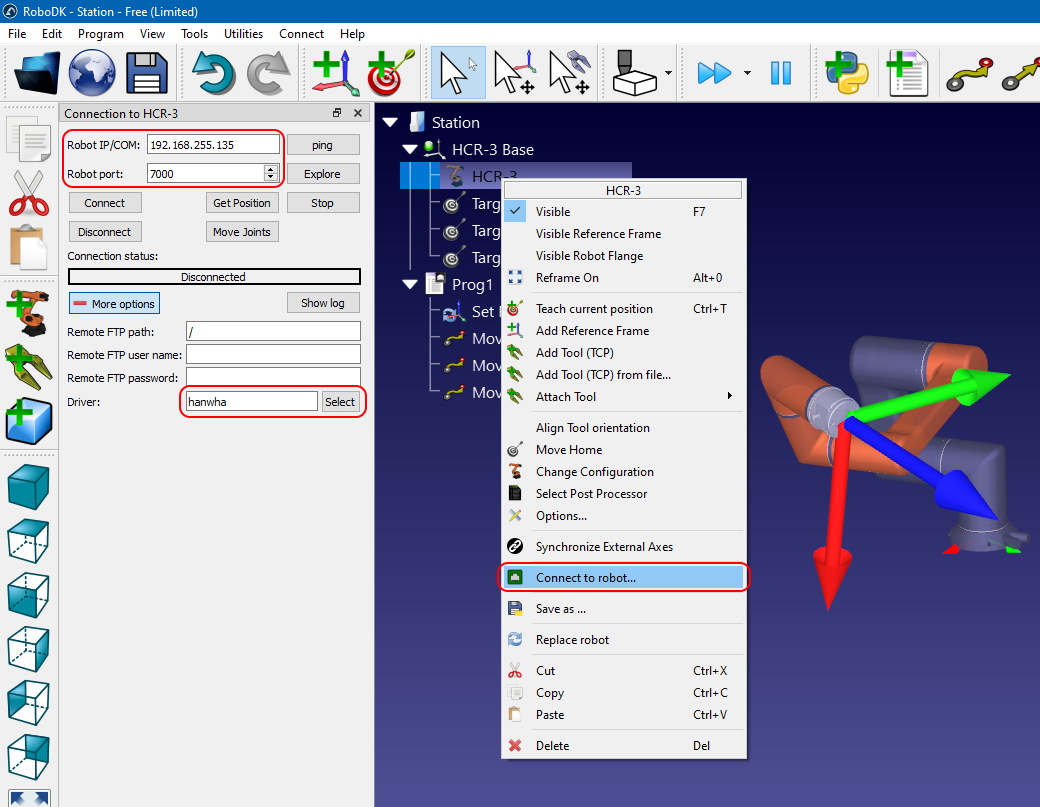
2.Klicken Sie mit der rechten Maustaste auf den Roboter in der Projektstruktur und wählen Sie Mit Roboter verbinden...
3.Füllen Sie im Fenster Verbindung zu HCR-3 die Felder Roboter-IP/COM und Roboter-Port aus (verwenden Sie die IP-Adresse des Roboters und die Portnummer aus dem RoboDK Plug-in).
4.Klicken Sie im selben Fenster auf die Schaltfläche Weitere Optionen und geben Sie Hanwha in das Feld Treiber ein (oder verwenden Sie die Schaltfläche Auswählen, um den entsprechenden Treiber aus der Liste auszuwählen).
5.Klicken Sie auf die Schaltfläche Verbinden. Wenn alle Einstellungen korrekt sind, wird in der Statusleiste der Verbindung Bereit angezeigt.