Manuelles Ersetzen des Roboter-Referenzrahmens
Die folgenden Schritte zeigen, wie Sie den Roboter-Referenzrahmen in der JAKA Zu App manuell konfigurieren.
Zunächst sollten Sie einen benutzerdefinierten JAKA Zu-Rahmen erstellen:
1.Navigieren Sie in JAKA Zu zu Einstellungen➔ Betriebseinstellungen➔ Benutzerkoordinatensystem.
2.Klicken Sie auf die Schaltfläche Bearbeiten, um X-, Y-, Z-, RX-, RY- und RZ-Werte für einen benutzerdefinierten Rahmen festzulegen.
3.Wählen Sie Bestätigen, um den Rahmen in JAKA Zu speichern.
Dann sollten Sie den importierten Rahmen durch den JAKA Zu-Rahmen ersetzen:
4.Führen Sie die unter Senden eines Programms an JAKA Zu aufgeführten Schritte aus.
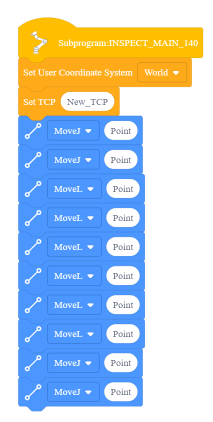
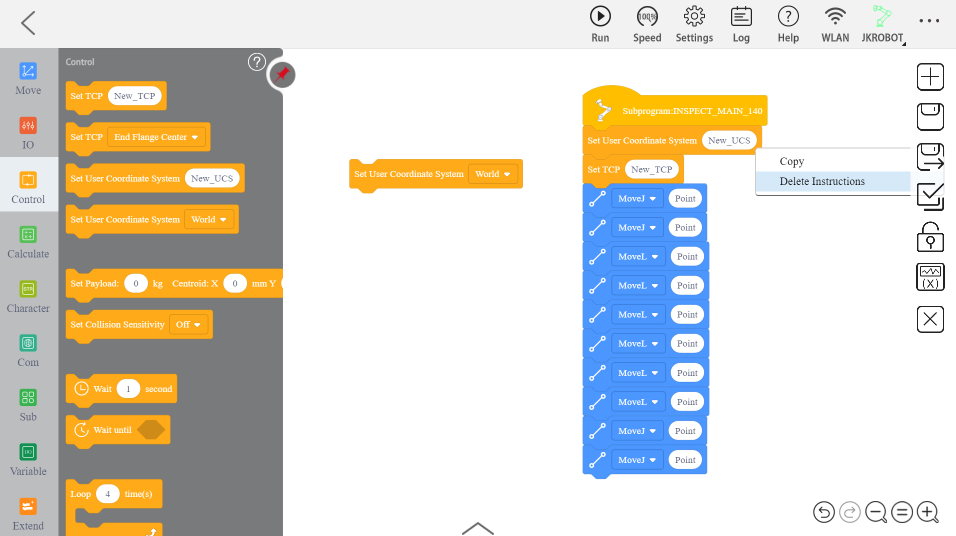
5.Öffnen Sie die Registerkarte Steuerung in der Seitenleiste und suchen Sie die Kachel "Benutzerkoordinatensystem festlegen", die die Dropdown-Box enthält.
6.Entfernen Sie die Kachel "New_UCS", die automatisch importiert wurde, indem Sie mit der rechten Maustaste darauf klicken und Löschen wählen.
7.Ersetzen Sie die entfernte Kachel durch die Kachel "Benutzerkoordinatensystem festlegen" und wählen Sie den benutzerdefinierten Rahmen aus dem Dropdown-Menü.