RoboDK Treiber für JAKA
Es kann eine Verbindung zwischen RoboDK und dem JAKA Roboter hergestellt werden, um den Roboter automatisch von einem angeschlossenen PC aus mit RoboDK zu bewegen. Dies ermöglicht die Verwendung der Option RoboDK Run on robot für Online-Programmierung und Debugging. Die Verbindung kann über eine Standard-Ethernet-Verbindung (TCP/IP) hergestellt werden.
Folgen Sie diesen Schritten, um den RoboDK-Treiber für die JAKA-Online-Programmierung einzurichten:
1.Starten Sie die JAKA Zu-App und verbinden Sie sich mit dem Roboter in der JAKA Zu-App.
2.Schalten Sie den JAKA Zu Roboter ein und aktivieren Sie ihn.
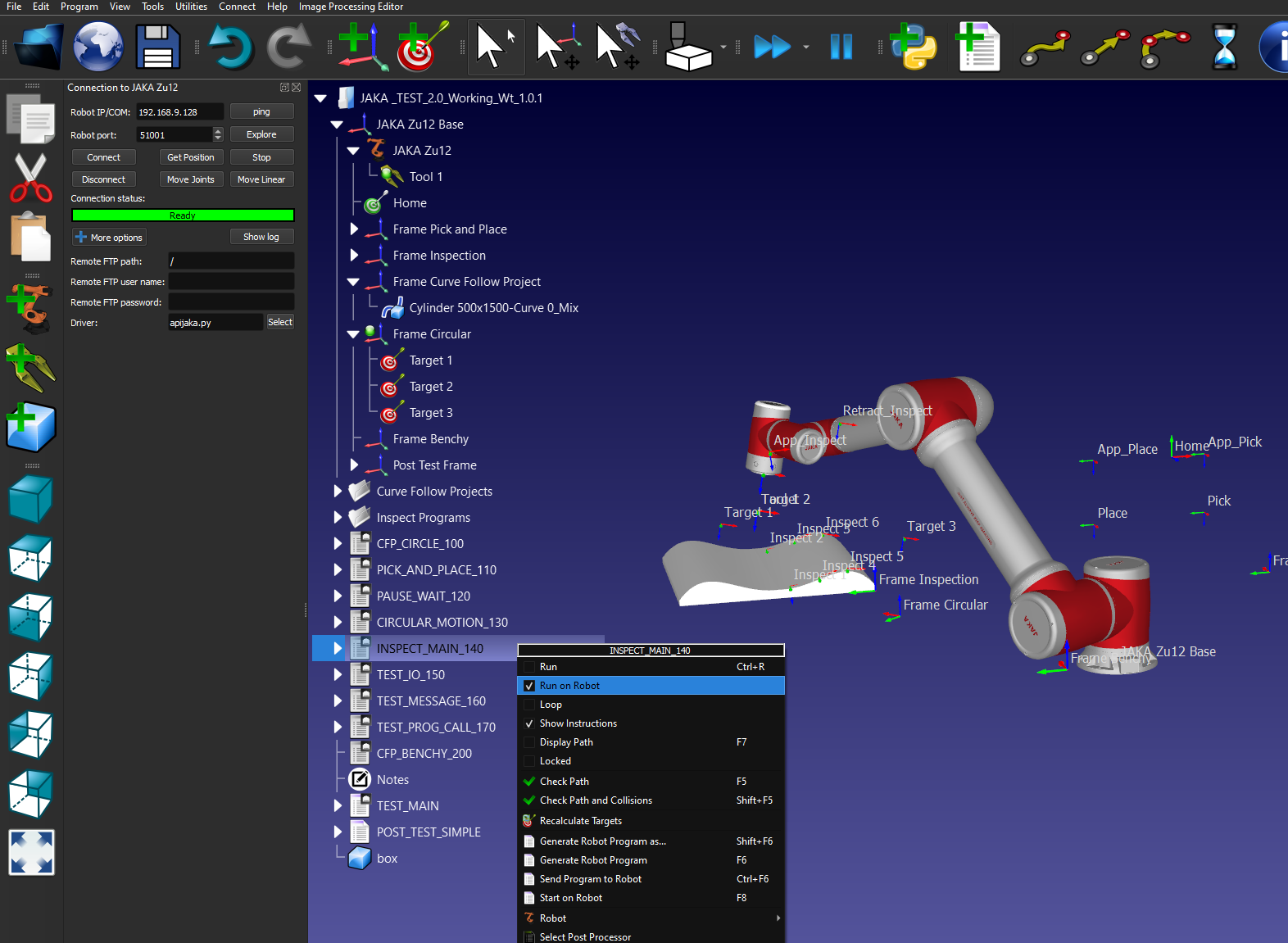
3.Wählen Sie in der RoboDK-Symbolleiste die Option Verbinden➔ Roboter verbinden.
4.Wählen Sie unter "Weitere Optionen" den JAKA-Treiber: apijaka.py.
5.Verwenden Sie Ihre Roboter-IP und Ihren Port, um den Roboter in RoboDK zu verbinden.
6.Sie können den JAKA-Roboter jetzt direkt von RoboDK aus bewegen
a.Um den Roboter in RoboDK zu einem Ziel zu bewegen, doppelklicken Sie auf das Ziel im Stationsbaum und wählen Sie die Schaltflächen "Gelenke bewegen" oder "Linear bewegen" in der Verbindungsschnittstelle, um eine Gelenk- oder Linearbewegung zum Ziel auszuführen.
b.Um ein Programm mithilfe des Treibers auf dem Roboter auszuführen, klicken Sie mit der rechten Maustaste auf das gewünschte Programm und wählen Sie die Option "Auf dem Roboter ausführen". Doppelklicken Sie dann auf das Programm, um es auf dem Roboter auszuführen.