Ein Programm auf der KEBA-Steuerung ausführen
Sobald Ihre RoboDK-Simulation fertig ist, können Sie offline ein Programm erstellen, das von der KEBA-Robotersteuerung ausgeführt werden kann (KAIRO-Datei).
Folgen Sie diesen Schritten, um aus Ihrer Robotersimulation ein Programm für Ihren Controller (KAIRO-Datei) zu erstellen:
1.Klicken Sie mit der rechten Maustaste auf ein Programm.
2.Wählen Sie Roboterprogramm generieren F6. Übertragen Sie dann die Dateien manuell über FTP in Ihr gewünschtes Projekt.
Wählen Sie alternativ nach der Einrichtung von SFTP die Option Roboterprogramm generieren Strg+F6.
3.Drücken Sie auf der Registerkarte Projekt des Teach-Pendants auf Aktualisieren.
4.Laden Sie das Programm und dann die Hauptdatei.

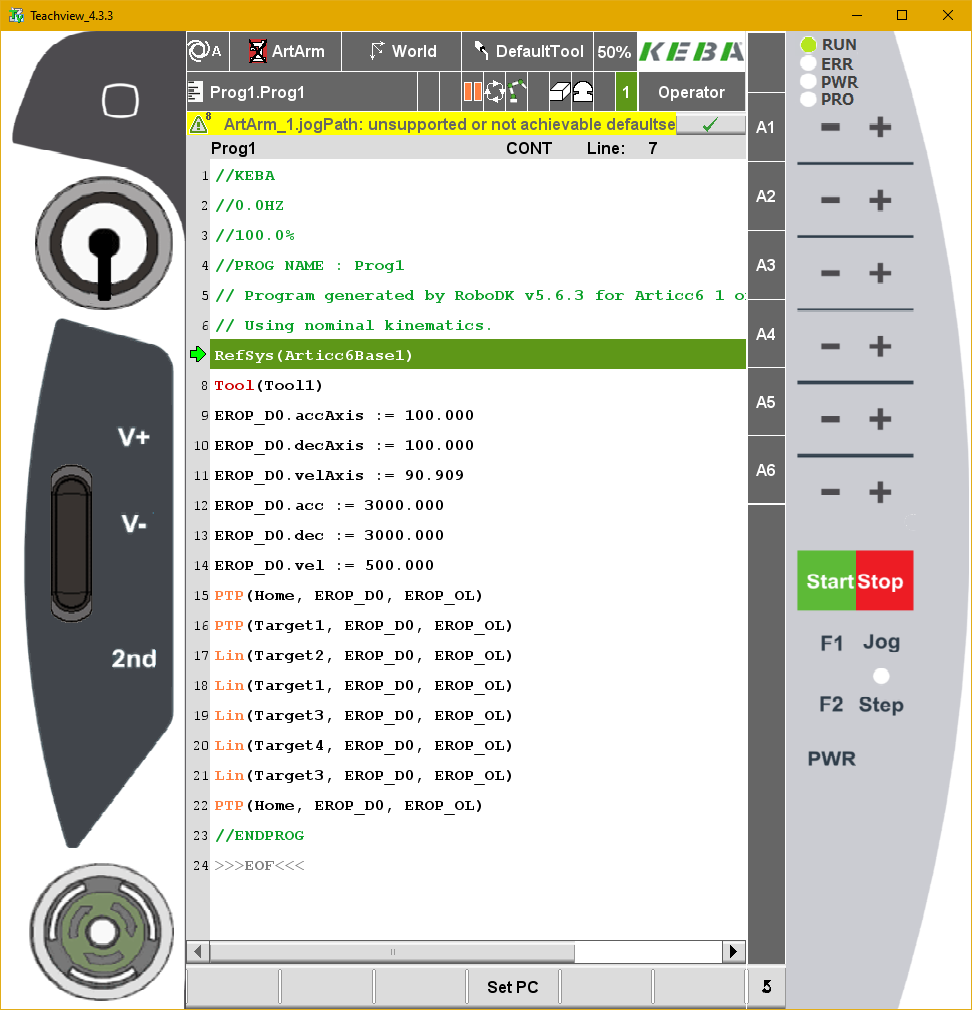
Das Programm wird in einem Texteditor angezeigt. Weitere Informationen über die Erstellung von Programmen aus RoboDK finden Sie im Abschnitt Roboterprogramm der Dokumentation.