Andere Tipps
In diesem Abschnitt finden Sie weitere nützliche Informationen zur Programmierung von Mecademic Meca500-Robotern.
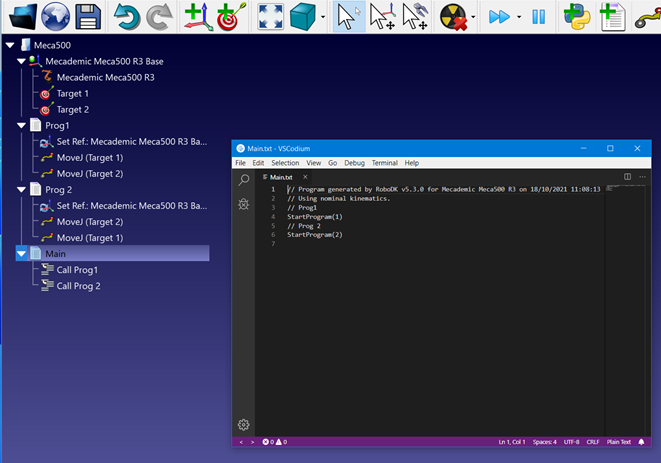
Offline-Programme
Offline-Programme bleiben auf dem Roboter erhalten und können über ihre jeweilige Programmnummer aufgerufen werden. Sie können die Auswahl der Programmnummer automatisieren, indem Sie sie an den Programmnamen anhängen.
RoboDK ruft die ID automatisch ab und verwendet sie für den Aufruf des Programms. Dies gilt auch für Unterprogramme, siehe das Beispiel unten.
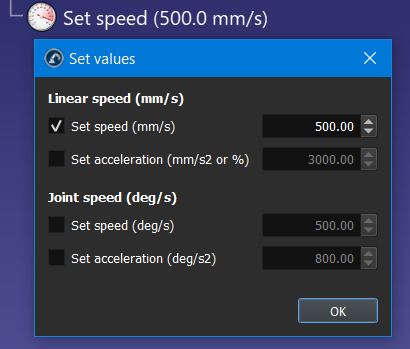
Geschwindigkeitseinheiten
Die Einheiten für die Gelenkgeschwindigkeit und die linearen und gemeinsamen Beschleunigungen für Mecademic-Roboter sollten als Prozentwert (%) angegeben werden, im Gegensatz zu anderen Einheiten, die im Menü für die Geschwindigkeitsanweisungen angezeigt werden.
Die lineare Geschwindigkeit ist korrekt und muss in mm/s angegeben werden.