Programm von RoboDK
Robotertreiber bieten eine Alternative zur Offline-Programmierung (bei der ein Programm generiert und dann auf den Roboter übertragen und ausgeführt wird). Sie können eine Simulation von RoboDK direkt auf dem Roboter ausführen (Online-Programmierung). Weitere Informationen finden Sie im Abschnitt Robotertreiber.
Befolgen Sie diese Schritte, um von RoboDK aus eine Verbindung mit dem Roboter herzustellen:
1.Klicken Sie mit der rechten Maustaste auf den Roboter in RoboDK
2.Wählen Sie aus: 
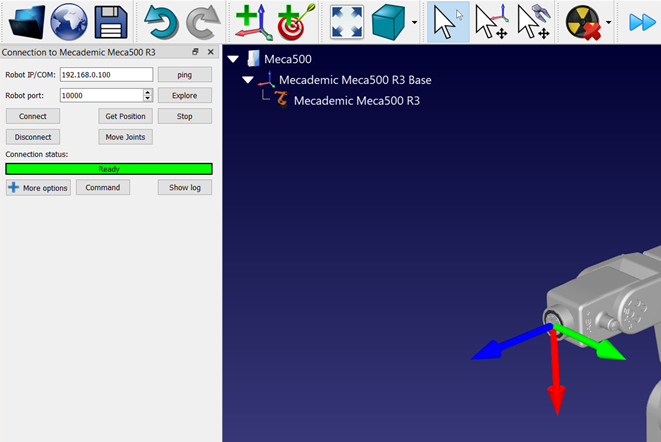
3.Geben Sie die IP des Roboters ein
4.Wählen Sie Verbinden.
Wenn die Verbindung erfolgreich war, sollte die grüne Meldung Bereit angezeigt werden.
Hinweis: Wenn die Verbindung fehlschlägt, vergewissern Sie sich, dass Sie die Netzwerkverbindung zwischen dem Computer und dem Roboter richtig hergestellt haben. Vergewissern Sie sich, dass sich die IP-Adresse des Computers im selben Netzwerk befindet wie die des Roboters. Unter Windows benötigen Sie dazu möglicherweise Administratorrechte. Weitere Informationen finden Sie im Abschnitt Fehlerbehebung bei Treibern.
Hinweis: Um dieses Problem besser beheben zu können, empfehlen wir Ihnen, die Windows-Firewall zu deaktivieren.
Sie können den Roboter bewegen, indem Sie im Verbindungsmenü Robotergelenke holen, Gelenke bewegen wählen.
Es gibt zwei verschiedene Methoden, um das Programm vom PC zum Roboter zu übertragen:
1.Schrittweise Ausführung auf dem Roboter mit Feedback in RoboDK (Online-Programmierung):
Bei dieser Methode wird der Roboter als Server verwendet und jede Anweisung wird Schritt für Schritt an den Roboter gesendet, während sie im Simulator ausgeführt wird. Diese Methode ist für Debugging-Zwecke nützlich.
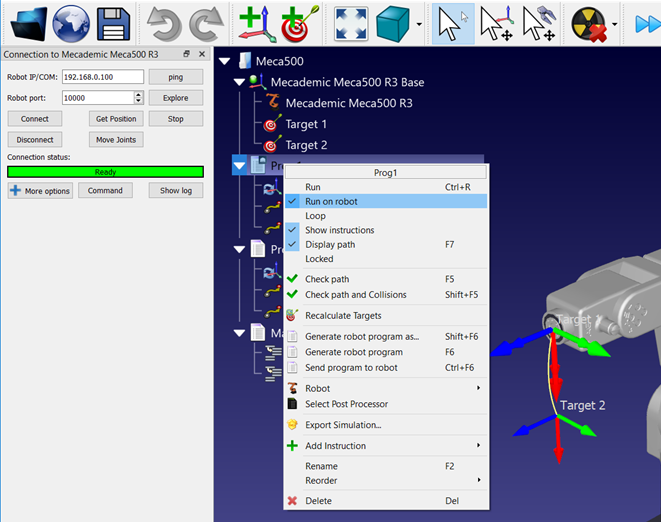
a.Klicken Sie mit der rechten Maustaste auf das Programm (in diesem Beispiel Print3D)
b.Wählen Sie Auf Roboter ausführen
c.Doppelklicken Sie auf das Programm, um es zu starten (oder klicken Sie mit der rechten Maustaste und wählen Sie Ausführen)
Wenn diese Option aktiviert ist, wird jedes Mal, wenn wir auf ein Programm doppelklicken (oder mit der rechten Maustaste klicken und dann Ausführen wählen), eine Verbindung zum echten Roboter hergestellt.
Diese Operationen sind auch über die RoboDK API verfügbar und ermöglichen die Integration der Roboterprogrammierung in andere Anwendungen. Die API ist in Python, C# und anderen Programmiersprachen verfügbar.
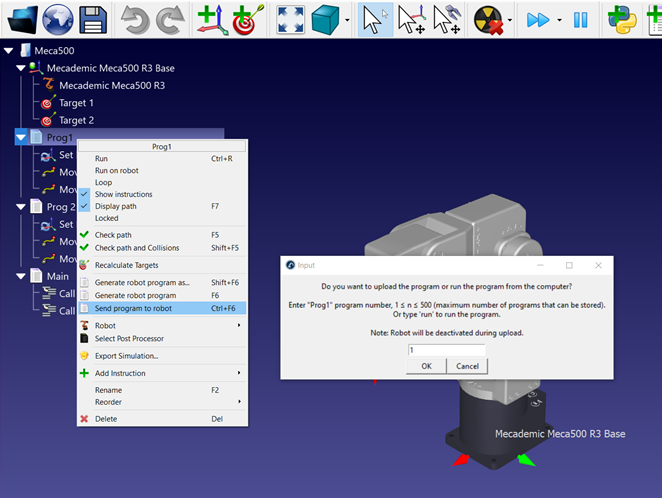
2.Senden Sie das Programm mit Hilfe der Mecademic Postprozessoren an den Roboter. Sie können das Programm auf dem Roboter ausführen, indem Sie "run" als Programmnummer angeben. Das vollständige Programm kann auch als Offline-Programm auf der Robotersteuerung gespeichert werden (siehe Offline-Programmierung des Roboters):
a.Klicken Sie mit der rechten Maustaste auf das Programm (in diesem Beispiel Prog1)
b.Wählen Sie Programm an Roboter senden (Strg+F6).