Starten Sie ein Programm auf dem Mecademic Controller
Sobald Ihre RoboDK-Simulation fertig ist, können Sie offline ein Programm erstellen, das von der Mecademic-Robotersteuerung ausgeführt werden kann (Skriptdatei). Sie können auch eine PY-Datei erstellen, die das Programm von einem entfernten Computer aus auf der Robotersteuerung ausführt.
Folgen Sie diesen Schritten, um ein Offline-Programm (ein Skript oder eine PY-Datei) aus Ihrer Robotersimulation zu erstellen:
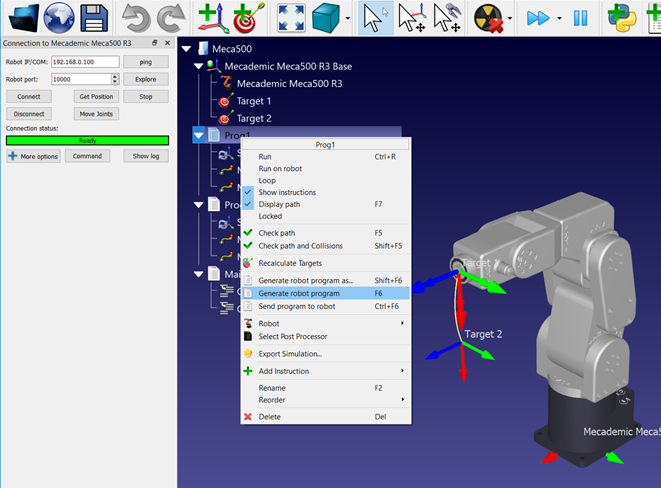
1.Klicken Sie mit der rechten Maustaste auf ein Programm (in diesem Beispiel Prog1)
2.Wählen Sie Roboterprogramm generieren F6
Das Programm wird in einem Texteditor angezeigt (dieses Verhalten kann im Menü geändert werden: Extras➔ Optionen➔ Programm).
So laden Sie eine Skriptdatei
Sobald Sie eine Programm-/Skriptdatei erhalten haben, können Sie das Programm ausführen oder es über die Weboberfläche auf den Controller laden. Folgen Sie diesen Schritten, um das Programm über die Mecademic-Weboberfläche auszuführen:
1.Öffnen Sie die Mecademic-Weboberfläche in Ihrem Webbrowser (geben Sie die IP-Adresse des Roboters ein).
2.Kopieren Sie den Inhalt des Skripts und fügen Sie ihn in den Programmeditor ein.
3.In der Statusleiste wählen Sie Verbinden, Aktivieren und Start Ihres Roboters.
4.Klicken Sie auf die Schaltfläche Abspielen, um das Programm zu starten.
5.Klicken Sie auf die Schaltfläche Speichern, um das Programm auf den Roboter zu laden.

So führen Sie eine PY-Datei aus
Sie können eine Python-Datei erzeugen, die sich automatisch über die TCP/IP-Schnittstelle von Mecademic mit dem Mecademic-Roboter verbindet und das Programm aus der Ferne ausführt.
Sie sollten den Postprozessor namens Mecademic Python auswählen. Die folgenden Schritte fassen das Verfahren zur Ausführung einer PY-Datei auf dem Mecademic zusammen.
1.Klicken Sie mit der rechten Maustaste auf das Programm und wählen Sie Postprozessor auswählen
2.Wählen Sie Mecademic Python
3.Klicken Sie mit der rechten Maustaste auf das Programm und wählen Sie Roboterprogramm generieren (F6)
4.Speichern Sie die erzeugte PY-Datei auf der Festplatte.
5.Öffnen Sie die PY-Datei in Ihrer IDE und führen Sie sie aus oder starten Sie sie direkt in Ihrer Python-Umgebung.