Aktualisieren der Impulse pro Grad Information
Motoman-Roboter benötigen die Impulse pro Grad für jedes Gelenk, um die Impulsverbindungswerte in Gelenkwinkelwerte und umgekehrt umzuwandeln. RoboDK führt diese Umwandlung automatisch durch, wenn die nötigen Informationen in den Roboterparametern zur Verfügung gestellt werden. Um die Informationen zur Verfügung zu stellen oder zu aktualisieren, gehen Sie wie folgt vor:
1.Doppelklicken Sie auf den Roboter in RoboDK
2.Wählen Sie Parameter
3.Wählen Sie Erweiterte Optionen freischalten
4.Sie können nun die Impulse/Grad für jede Gelenkverbindung ansehen und aktualisieren
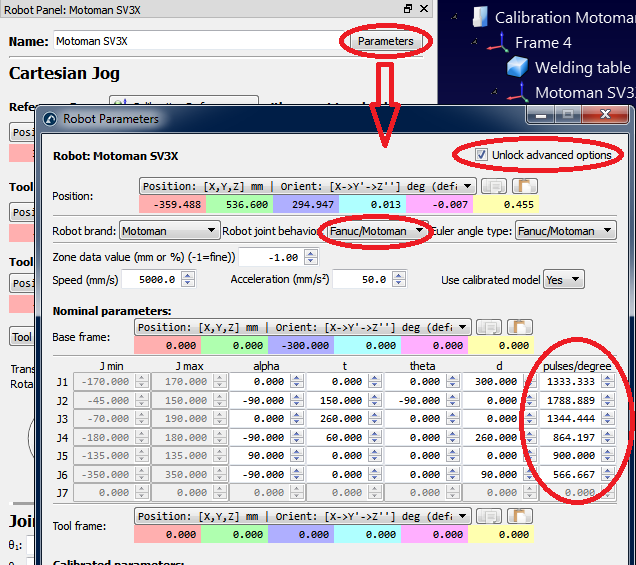
Es ist darüber hinaus wichtig zu beachten, dass einige Motoman-Roboter eine Verbindung zwischen den Achsen 2 und 3 haben. Dies bedeutet, dass sich das Gelenk 3 bewegt, wenn das Gelenk 2 bewegt wird. In diesem Fall muss das Feld Gelenkverhalten des Roboters auf Fanuc/Motoman geändert werden.