Übertragen Sie eine Datei über USB
Wenn Sie den Standard-Postprozessor verwenden, erhalten Sie Ihr Programm als ZIP-Datei. Sie sollten ein USB-Laufwerk mit den folgenden Eigenschaften vorbereiten, um die Datei ordnungsgemäß auf den Roboter zu laden:
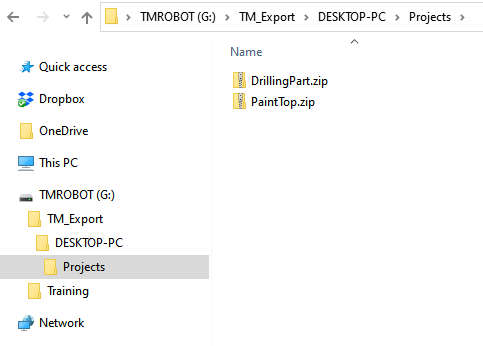
1.Benennen Sie das USB-Laufwerk TMROBOT (dieser Schritt ist wichtig).
2.Erstellen Sie einen neuen Ordner namens TM_Export im Stammverzeichnis Ihres Laufwerks.
3.Erstellen Sie innerhalb von TM_Export einen neuen Ordner mit Ihrem Projekt (der Name kann beliebig gewählt werden).
4.Erstellen Sie einen neuen Ordner innerhalb des vorherigen Ordners mit dem Namen Projekte.
5.Legen Sie die ZIP-Programme in den Ordner Projekte.
Folgen Sie diesen Schritten, um das Programm in TMFlow zu laden:
1.Speichern Sie die von RoboDK erstellte ZIP-Datei auf dem USB-Laufwerk in dem Ordner, der den vorhergehenden Schritten folgt.
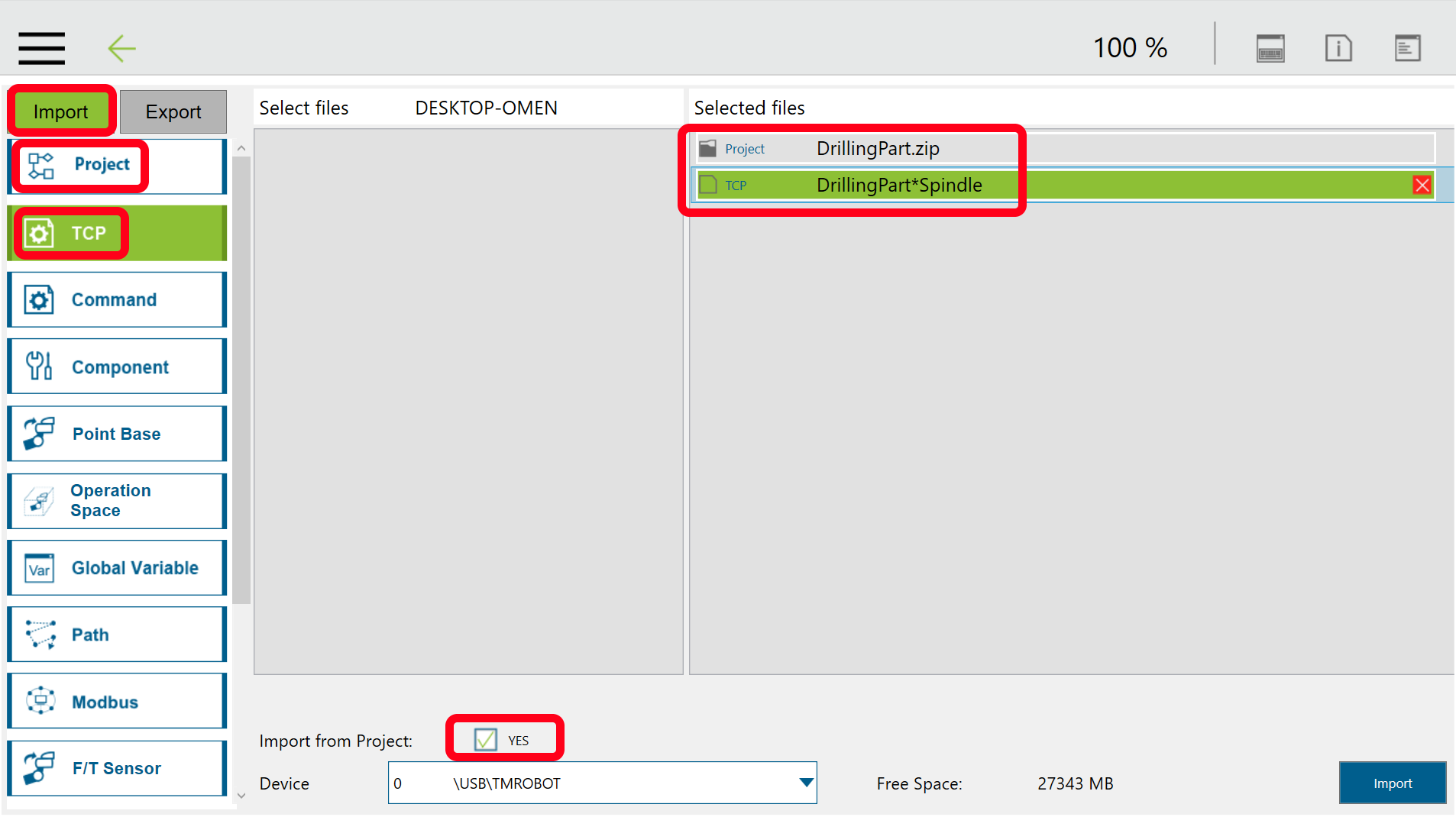
2.Wählen Sie das Hauptmenü➔ System➔ Import/Export
3.Wählen Sie Importieren und wählen Sie Ihren Ordner in TM_Export
4.Wählen Sie Projekt und wählen Sie Ihr(e) ZIP-Programm(e).
5.Wählen Sie TCP
6.Aktivieren Sie die Option Aus Projekt importieren➔ Ja
7.Wählen Sie Ihr Programm und wählen Sie die Werkzeuge in Ihrem Programm, um sicherzustellen, dass Sie sie laden.
8.Wählen Sie Importieren
Ihr Programm wird nun verfügbar sein, wenn Sie neue Programme öffnen.
Hinweis: Wenn Sie die Werkzeuge bereits in Ihrer Robotersteuerung definiert haben, sollten Sie die Schritte 5, 6 und 7 nicht ausführen. Stattdessen können Sie Ihre Werkzeuge in RoboDK einfach mit demselben Namen benennen, der auch in Ihrer Robotersteuerung erscheint.