Omron-TM-Roboter
Omron-TM-Roboter können mit TMFlow-ZIP-Dateien offline von RoboDK aus programmiert werden. Sie können den Robotertreiber auch verwenden, wenn sich der Roboter in einem Listen Node befindet, um den Roboter direkt aus RoboDK in Echtzeit zu bewegen.
Übertragen Sie eine Datei über USB
Wenn Sie den Standard-Postprozessor verwenden, erhalten Sie Ihr Programm als ZIP-Datei. Sie sollten ein USB-Laufwerk mit den folgenden Eigenschaften vorbereiten, um die Datei ordnungsgemäß auf den Roboter zu laden:
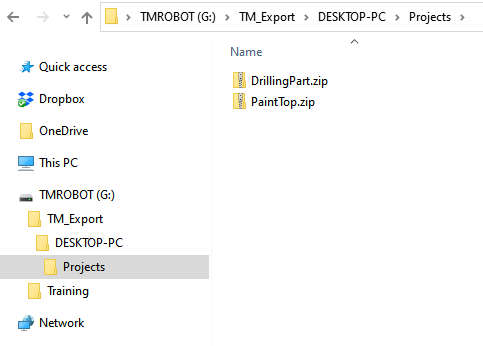
1.Benennen Sie das USB-Laufwerk TMROBOT (dieser Schritt ist wichtig).
2.Erstellen Sie einen neuen Ordner namens TM_Export im Stammverzeichnis Ihres Laufwerks.
3.Erstellen Sie innerhalb von TM_Export einen neuen Ordner mit Ihrem Projekt (der Name kann beliebig gewählt werden).
4.Erstellen Sie einen neuen Ordner innerhalb des vorherigen Ordners mit dem Namen Projekte.
5.Legen Sie die ZIP-Programme in den Ordner Projekte.
Folgen Sie diesen Schritten, um das Programm in TMFlow zu laden:
1.Speichern Sie die von RoboDK erstellte ZIP-Datei auf dem USB-Laufwerk in dem Ordner, der den vorhergehenden Schritten folgt.
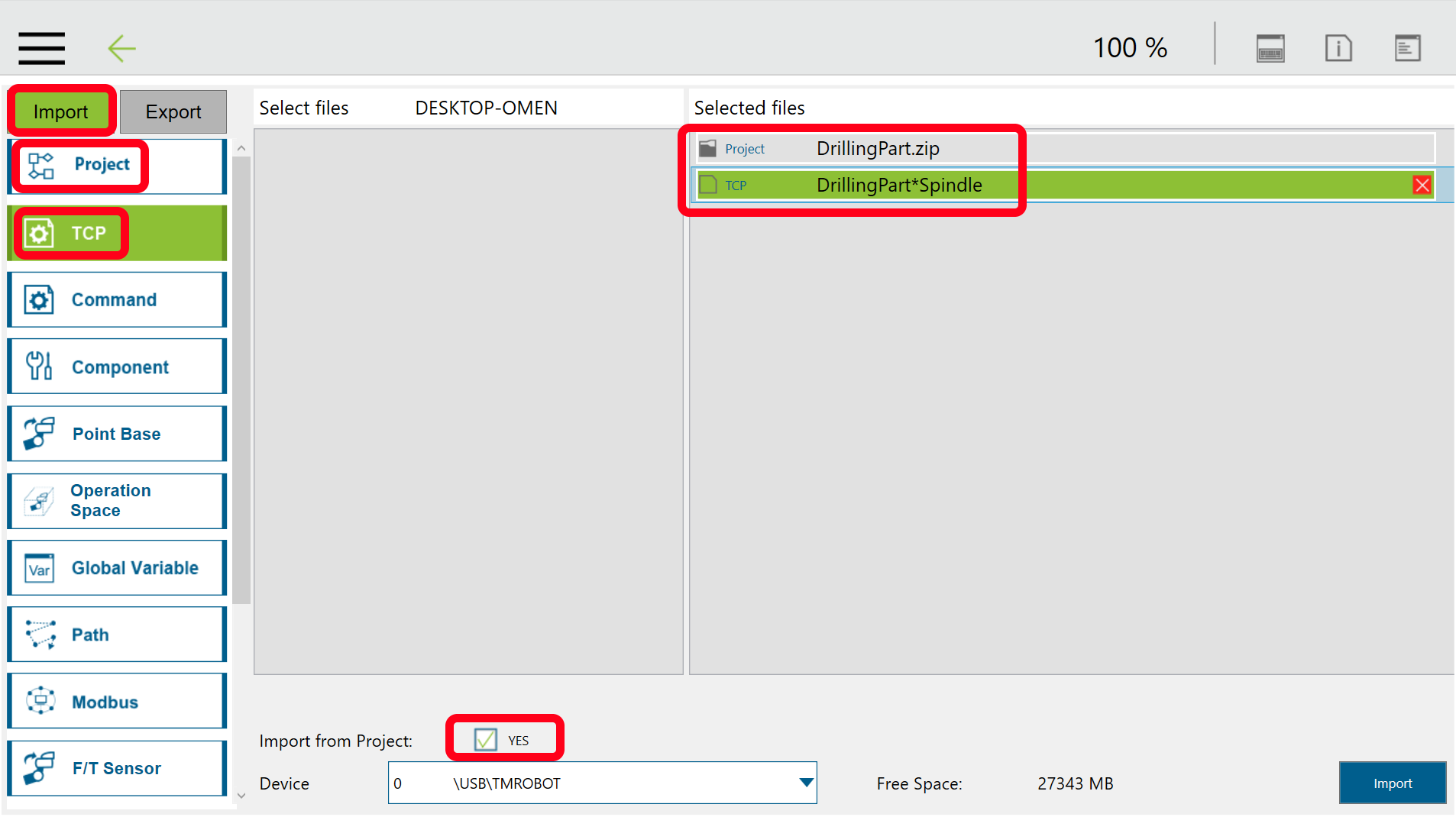
2.Wählen Sie das Hauptmenü➔ System➔ Import/Export
3.Wählen Sie Importieren und wählen Sie Ihren Ordner in TM_Export
4.Wählen Sie Projekt und wählen Sie Ihr(e) ZIP-Programm(e).
5.Wählen Sie TCP
6.Aktivieren Sie die Option Aus Projekt importieren➔ Ja
7.Wählen Sie Ihr Programm und wählen Sie die Werkzeuge in Ihrem Programm, um sicherzustellen, dass Sie sie laden.
8.Wählen Sie Importieren
Ihr Programm wird nun verfügbar sein, wenn Sie neue Programme öffnen.
Hinweis: Wenn Sie die Werkzeuge bereits in Ihrer Robotersteuerung definiert haben, sollten Sie die Schritte 5, 6 und 7 nicht ausführen. Stattdessen können Sie Ihre Werkzeuge in RoboDK einfach mit demselben Namen benennen, der auch in Ihrer Robotersteuerung erscheint.
Listen-Knoten einrichten
Mit dem RoboDK-Treiber für Omron-TM können Sie Programme direkt von RoboDK aus auf Ihrem Omron-TM Roboter ausführen. Sie können Programme auch als Skriptdateien erstellen, die über das TCP/IP-Protokoll gestreamt werden. In beiden Fällen sollten Sie sicherstellen, dass sich der Roboter in einem Listen-Knoten befindet. Dieser Abschnitt beschreibt, wie Sie die Kommunikation in RoboDK und auf dem Omron-TM Roboter einrichten.
Es ist möglich, zwischen verschiedenen Postprozessoren zu wählen oder Postprozessoren anzupassen, um die Art und Weise der Offline-Erstellung und -Ausführung von Programmen zu definieren (z.B. zur Unterstützung eines Greifers oder externer Sensoren).
Hinweis: Der Standard-Postprozessor für Omron-TM-Roboter (Omron oder Techman genannt) erzeugt eine ZIP-Datei, die Sie wie im vorherigen Abschnitt beschrieben manuell laden können. Alternativ generiert der Remote-Postprozessor ein SCRIPT-Programm und eine PY-Datei, die Sie aus der Ferne verwenden können. Wenn Sie die PY-Datei ausführen, wird automatisch eine Verbindung zum Roboter hergestellt und die SCRIPT-Datei über TCP/IP gesendet.
Hinweis: Wenn Sie ein Programm mit dem Remote-Postprozessor erstellen, erhalten Sie 2 Dateien: eine SCRIPT-Datei und eine PY-Datei. Sie sollten die PY-Datei ausführen, um das Programm automatisch auf den Roboter zu übertragen und auszuführen.
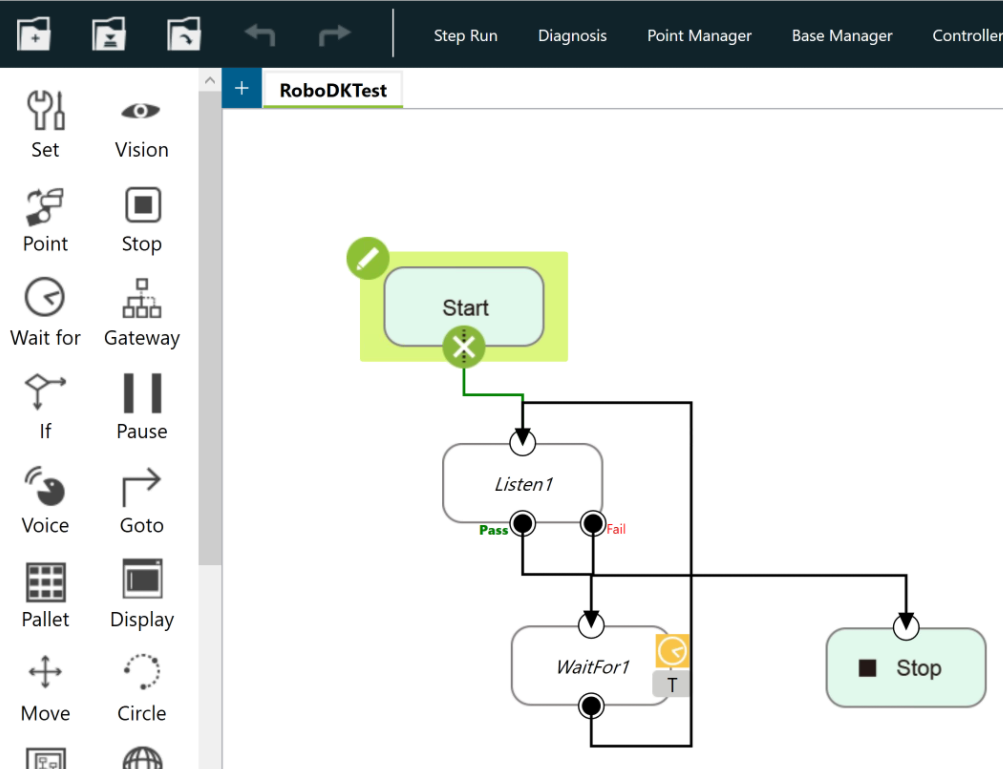
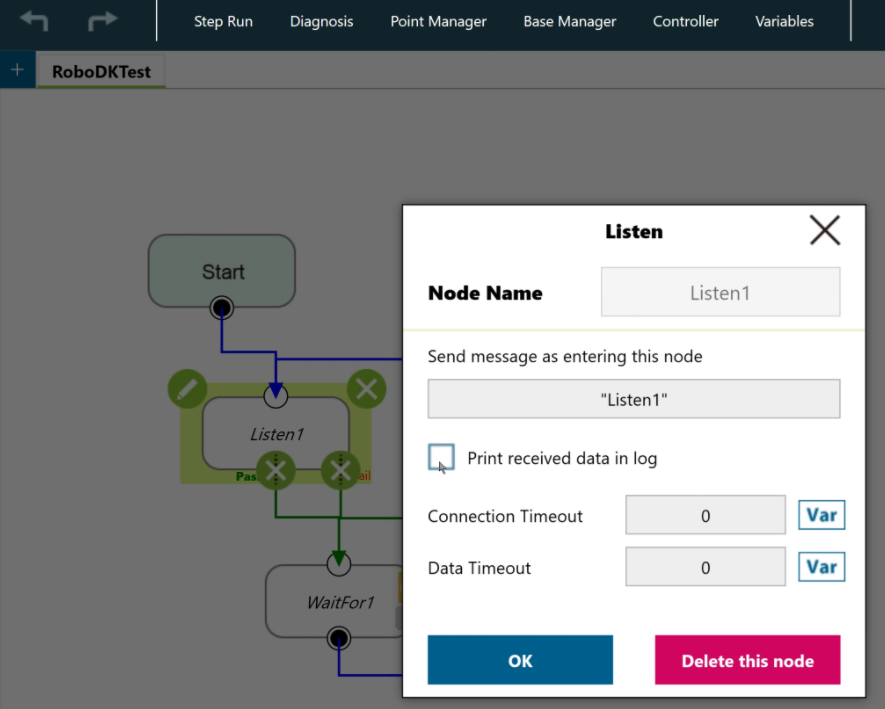
Damit sich der Roboter aus der Ferne bewegen kann, muss er sich im Listen-Modus befinden. Dies wird mit einem Listen-Knoten erreicht. Die folgende Abbildung zeigt einen vorgeschlagenen Programmablauf, um ein Programm zu haben, das das von RoboDK gesendete Programm automatisch ausführt. Es wird empfohlen, die Option Empfangene Daten im Protokoll drucken zu wählen, um Probleme zu beheben.
Folgen Sie diesen Schritten, um die Kommunikation in RoboDK einzurichten und ein Programm auszuführen:
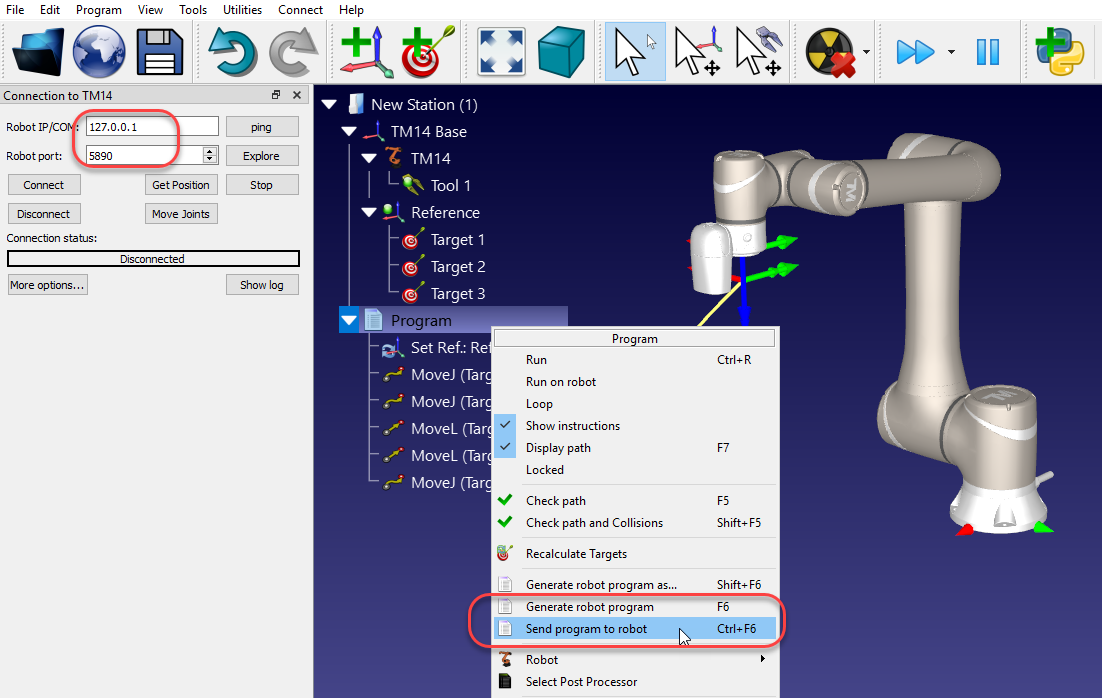
1.Wählen Sie Connect➔ Roboter verbinden
2.Geben Sie die Roboter-IP ein
3.Geben Sie den Port 5890 ein
4.Klicken Sie mit der rechten Maustaste auf Ihr Programm
5.Wählen Sie Roboterprogramm generieren F6.
Hinweis: Alternativ können Sie auch Programm an Roboter senden (Strg+F6) wählen, um die Ausführung des Programms auf dem Roboter automatisch auszulösen.