Aktualisieren der Roboterkinematik
Die Schritte in diesem Abschnitt sind optional und nur unter bestimmten Umständen erforderlich, wenn eine bestimmte Genauigkeit bei der Offline-Programmierung benötigt wird. In diesem Abschnitt wird die Eingabe eindeutiger kinematischer Werte vom UR-Roboter in RoboDK erläutert, um Roboterprogramme genau zu simulieren und zu generieren.
Die UR-Roboterkinematiken unterscheiden sich in 6 Abstandswerten von einem Roboter zum anderen und von Standard-Simulationswerten. Je nachdem, wie der Roboter programmiert ist, kann es wichtig sein, diese Werte zu berücksichtigen.
Die genauen Kinematiken eines spezifischen UR-Roboters können in RoboDK folgendermaßen verwendet werden:
1.Rufen Sie die Datei urcontrol.conf.[UR3/UR5/UR10]] aus einem Ordner namens URControl in der Robotersteuerung auf. Die Datei kann über eine USB-Festplatte/Stick oder über eine FTP-Verbindung übertragen werden (siehe vorherigen Abschnitt).
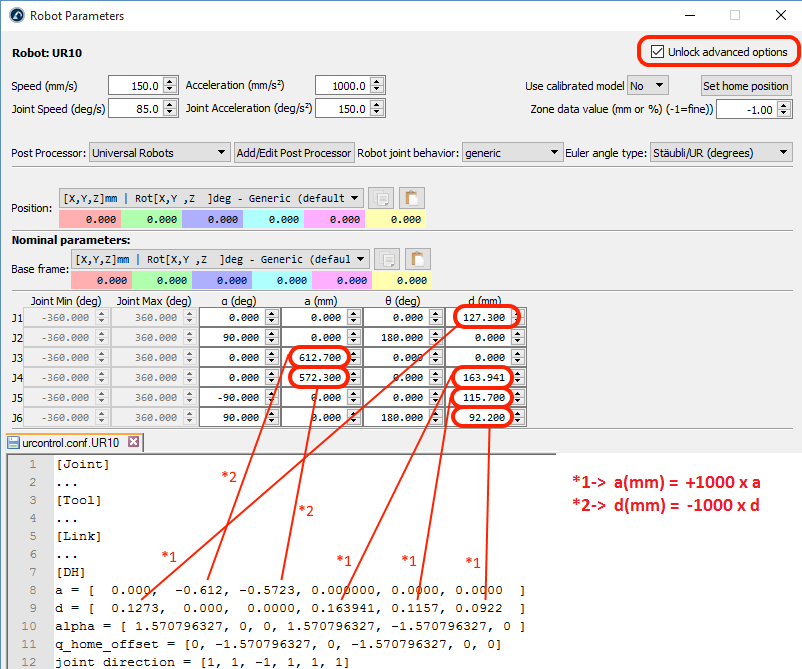
2.Öffnen Sie die Datei in einem Texteditor und suchen Sie nach den [DH] -Werten, wie im Bild gezeigt.
3.Öffnen Sie das Roboterparameterfenster von RoboDK, indem Sie auf den Roboter doppelklicken und "Parameter" auswählen.
4.Wählen Sie "Erweiterte Optionen entsperren", um die 6 Abstandswerte bearbeiten zu können.
5.Geben Sie die 6 rot markierten Werte aus der DH-Tabelle (Denavit Hartenberg) in der Datei urcontrol.conf.ur10 in RoboDK ein, wie im Bild gezeigt.
Wenn Sie fertig sind, können Sie mit der rechten Maustaste auf einen Roboter klicken und Speichern unter .robot auswählen. Diese Parameter werden mit der Roboterdatei gespeichert
Die UR-Kinematik ist von Roboter zu Roboter unterschiedlich, da jeder Roboter in der Fabrik kalibriert wird. Andere Marken wie KUKA, ABB, Motoman oder Fanuc kalibrieren ihre Roboter nicht, es sei denn die sogenannte Absolute Genauigkeit Option wird gekauft. Die Optionen für die absolute Genauigkeit können bis zu 40 Kalibrierungsparameter oder mehr berücksichtigen.