Einrichtung
Um das TwinTrack-System zu verwenden, müssen Sie Ihren Roboter in RoboDK laden und eine Verbindung zum Roboter und dem Messsystem herstellen. Optional können wir die Zelle modellieren, indem wir die 3D-Modelle der Objekte und Werkzeuge hinzufügen. Dies wird helfen, Kollisionen zu vermeiden.
8.Laden Sie den Roboter:
a.Wählen Sie Datei➔ Online-Bibliothek öffnen. Die Online-Bibliothek wird in RoboDK angezeigt.
b.Verwenden Sie die Filter, um Ihren Roboter zu finden.
c.Wählen Sie Download, um den Roboter automatisch in Ihre RoboDK Station zu laden.
d.Alternativ können Sie die Roboterdatei auch direkt aus der Online-Bibliothek (https://robodk.com/library) herunterladen und die Datei mit RoboDK öffnen (.robot-Datei).
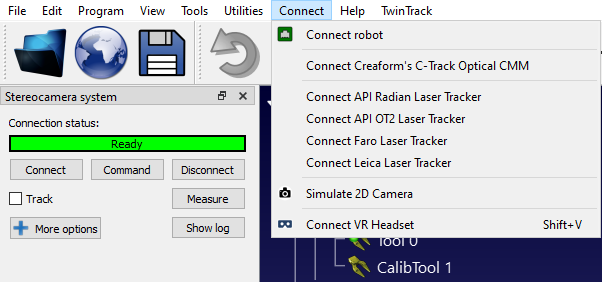
9.Schließen Sie das Messsystem an:
a.Schließen Sie das Messsystem an Ihren Computer an.
b.Wählen Sie Verbinden und stellen Sie eine Verbindung zu Ihrem Messsystem her. Stellen Sie sicher, dass die erforderliche Software ebenfalls installiert ist. Je nachdem, welches Messsystem Sie verwenden, müssen Sie möglicherweise die IP des Trackers ändern.
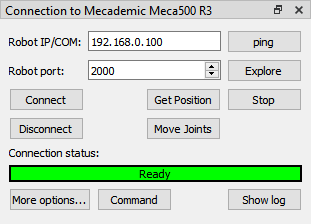
10.Schließen Sie den Roboter an:
a.Wählen Sie Verbinden➔ Roboter verbinden.
b.Geben Sie die Roboter-IP und den Port ein.
c.Wählen Sie Verbinden.
Hinweis: Einige Robotersteuerungen erfordern eine bestimmte Einrichtung oder bestimmte Softwareoptionen. Weitere Informationen finden Sie im Abschnitt Robotertreiber.