Kalibrierung der Roboterparameter
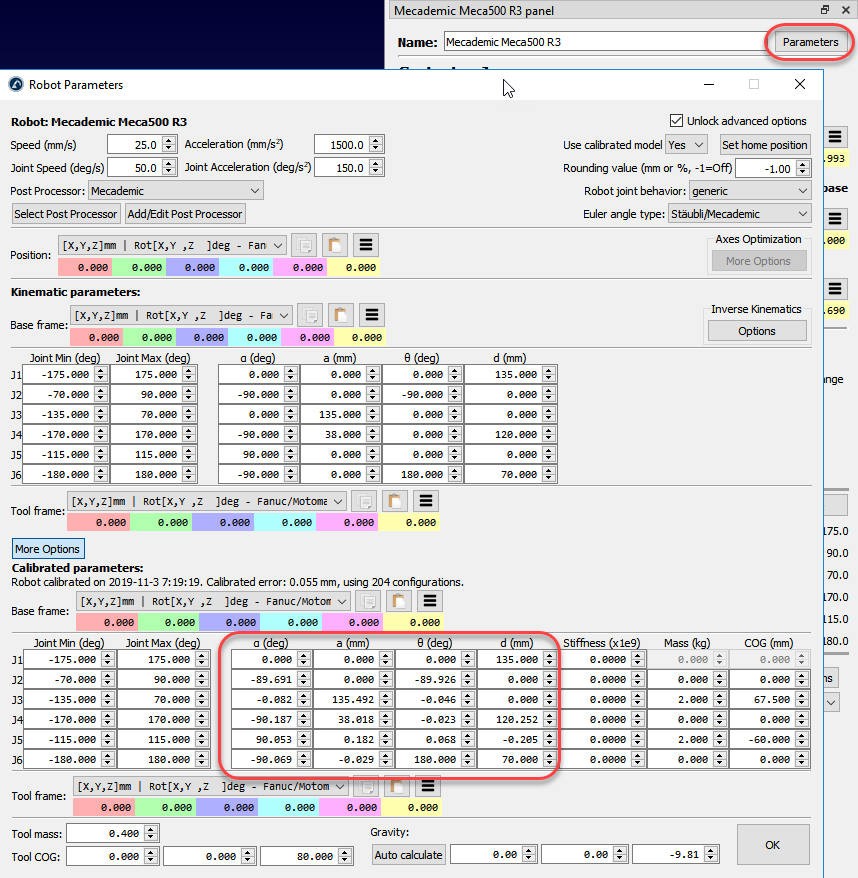
Sie können auf die kalibrierten Parameter im Menü Parameter zugreifen, sobald ein Roboter kalibriert wurde. Einige Robotersteuerungen erlauben das Ändern bestimmter Roboterparameter.
Hinweis: RoboDK verwendet die Denatit-Hartenberg Modified Konvention. Stellen Sie sicher, dass Sie alle ausgewählten/kalibrierten Parameter verwenden.
Wichtig: Wir sollten sicherstellen, dass wir keine gefilterten Programme erzeugen, wenn wir die Parameter der Robotersteuerung aktualisieren.