Kurven in Bewegung lehren
Sie können Kurven, Ziele und Koordinatensysteme auf einem sich bewegenden Objekt erstellen, wenn Ihr Messsystem die gleichzeitige Verfolgung mehrerer Objekte unterstützt. Dies kann auf dieselbe Weise geschehen, als ob es sich um statische Objekte handeln würde.
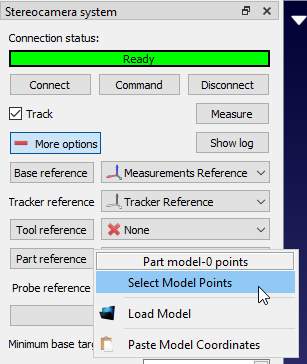
Der Hauptunterschied besteht darin, dass das sich bewegende Objekt in Echtzeit verfolgt werden muss (mit einem Tracker oder reflektierenden Zielen). Wenn Sie z.B. das Creaform C-Track Messsystem verwenden, sollten Sie das Modell im Teilereferenzabschnitt angeben und es mit dem Koordinatensystem verknüpfen, das es repräsentiert.
Die richtige Abhängigkeit von Koordinatensystemen und Objekten muss in RoboDK definiert werden, damit Sie neue Koordinatensysteme relativ zu Ihrem beweglichen Ziel definieren können.
Diese Methode der Programmierung von Teilen ist möglicherweise nicht so genau wie bei statischen Teilen.
Hinweis: Es wird empfohlen, die Probenahmezeit zu verkürzen, um genauere Ergebnisse zu erhalten.