Lehren Sie ein Koordinatensystem
Mit RoboDK TwinTrack können Sie Ihre Koordinatensysteme (oder Referenzrahmen) antasten und lokalisieren, um Objekte im Arbeitsbereich des Roboters zu finden.
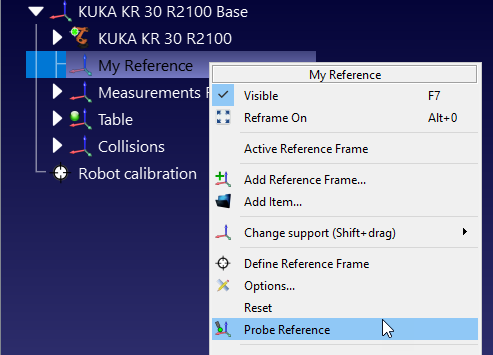
Klicken Sie mit der rechten Maustaste auf Ihr Koordinatensystem und wählen Sie Probe Reference.
Sie sollten dann 3 Punkte in der folgenden Reihenfolge untersuchen:
1.Erster Punkt im Ursprung.
2.Zweiter Punkt entlang der positiven X-Achse.
3.Dritter Punkt entlang der positiven Y-Achse.
Wenn Sie Ihr Koordinatensystem richtig einstellen, können Sie Roboter aus der Ferne programmieren. Wenn Sie z.B. ein neues Teil programmieren möchten, können Sie dies einfach von Ihrem Büro oder von zu Hause aus tun, ohne in der Nähe Ihres Roboters sein zu müssen, wenn Sie eine richtig definierte Vorrichtung haben.