Programm-Filterung
Sobald der Roboter kalibriert ist, müssen wir sicherstellen, dass wir gefilterte Programme erstellen oder die kalibrierten Roboterparameter berücksichtigen, um die Vorteile der Roboterkalibrierung zu nutzen.
Wir sollten eine der folgenden Methoden anwenden, um Roboter nach der Kalibrierung genau zu programmieren:
1.Verwenden Sie RoboDK für die Offline-Programmierung, um genaue Programme zu erzeugen (die erzeugten Programme sind bereits gefiltert). Dies ist die empfohlene Offline-Programmieroption für optimale Genauigkeitsergebnisse.
2.Kalibrieren Sie die Parameter der Robotersteuerung (z. B. Verbindungslängen, DH-DHM-Parameter und/oder Mastering-Parameter).
Genaue Offline-Programmierung
Wenn ein Roboter mit RoboDK kalibriert wurde, haben wir die Möglichkeit, die genaue Kinematik zu aktivieren, indem wir mit der rechten Maustaste auf den Roboter klicken und Genaue Kinematik verwenden auswählen.
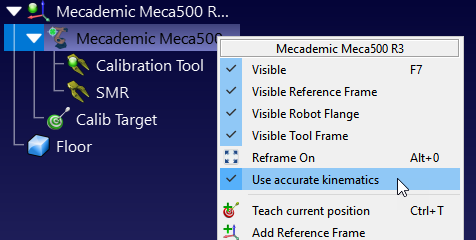
Wenn die Genauigkeit aktiv ist, sehen wir einen grünen Punkt, wenn sie nicht aktiv ist, sehen wir einen roten Punkt.
Dies ist die empfohlene Option, um optimale Genauigkeitsergebnisse zu erzielen. Wenn die Option Robotergenauigkeit in RoboDK aktiviert ist, werden alle von RoboDK generierten Programme automatisch gefiltert. Das bedeutet, dass alle kartesischen Koordinaten leicht verändert werden, um Roboterfehler zu kompensieren.
Dies ist die beste Option, wenn Sie planen, Ihre Roboter für die Roboterbearbeitung einzusetzen, Roboter aus NC-Dateien zu programmieren oder eines der von RoboDK unterstützten CAD/CAM-Plugins zu verwenden.
Wichtig! Sobald Sie ein Programm erstellt haben, sollten Sie sicherstellen, dass Sie die Roboterkonfiguration nicht mehr ändern.
Hinweis: Sie sollten sich vergewissern, dass der Werkzeugmittelpunkt (TCP) und der Referenzrahmen in RoboDK kalibriert und definiert wurden (und mit den Werten im realen Setup übereinstimmen, bevor Sie filtern).
Kalibrierung der Roboterparameter
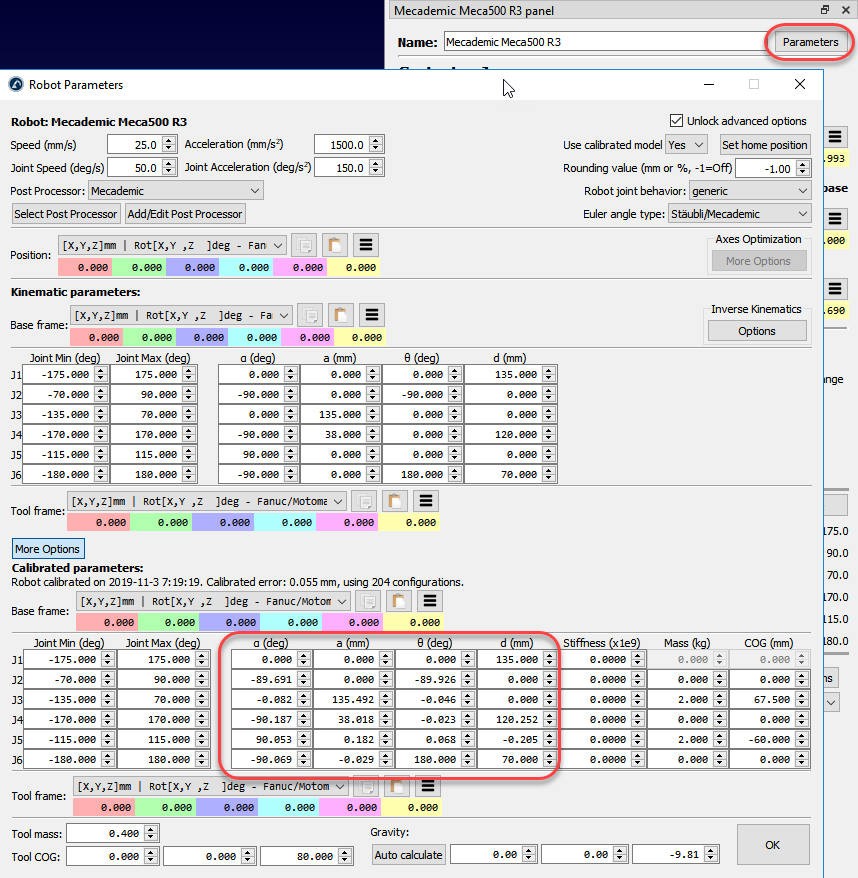
Sie können auf die kalibrierten Parameter im Menü Parameter zugreifen, sobald ein Roboter kalibriert wurde. Einige Robotersteuerungen erlauben das Ändern bestimmter Roboterparameter.
Hinweis: RoboDK verwendet die Denatit-Hartenberg Modified Konvention. Stellen Sie sicher, dass Sie alle ausgewählten/kalibrierten Parameter verwenden.