Referenzrahmen und Werkzeugrahmen
RoboDK bietet einige Hilfsprogramme zur Kalibrierung von Referenzrahmen und Werkzeugrahmen. Auf diese Werkzeuge können Sie über Utilities➔ Referenzrahmen kalibrieren bzw. Utilities➔ Werkzeugrahmen kalibrieren zugreifen.
Um einen Referenzrahmen oder ein Werkzeug zu kalibrieren, das nicht automatisch kalibriert wurde (auch bekannt als Benutzerrahmen bzw. TCP), benötigen wir einige Roboterkonfigurationen, die 3 oder mehr Punkte berühren. Diese Roboterkonfigurationen können entweder Gelenkwerte oder kartesische Koordinaten sein (in einigen Fällen mit Orientierungsdaten). Es wird empfohlen, die Gelenkwerte anstelle der kartesischen Koordinaten zu verwenden, da es einfacher ist, die tatsächliche Roboterkonfiguration in RoboDK zu überprüfen (durch Kopieren und Einfügen der Robotergelenke in den RoboDK-Hauptbildschirm).
Werkzeug-Kalibrierung
Wählen Sie Utilities➔ Kalibrieren, um den TCP mit RoboDK zu kalibrieren. Sie können so viele Punkte wie gewünscht mit unterschiedlichen Ausrichtungen verwenden. Mehr Punkte und größere Ausrichtungsänderungen sind besser, da wir so eine bessere Schätzung des TCP sowie eine gute Schätzung des TCP-Fehlers erhalten.
Hinweis: Weitere Informationen finden Sie in der Rubrik Tipps.
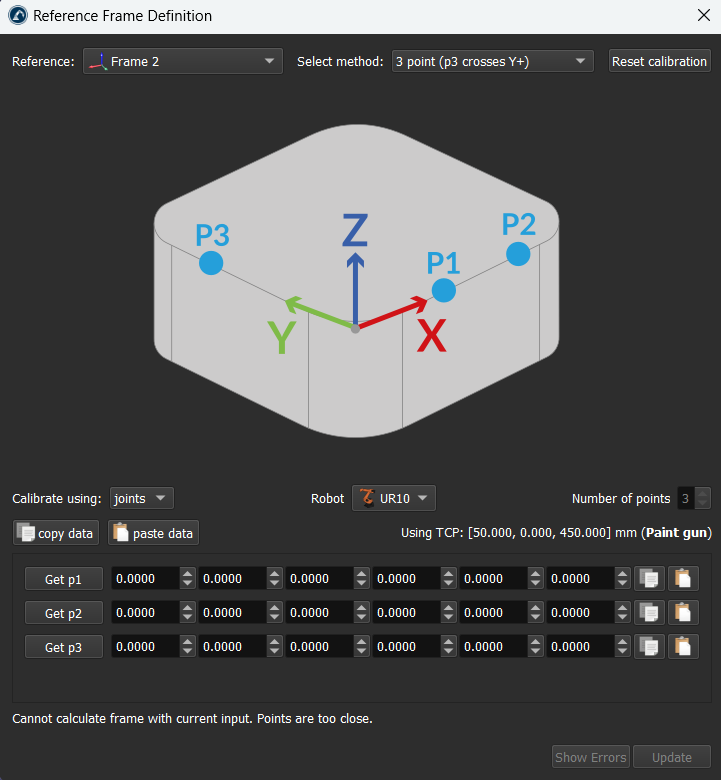
Referenzrahmen-Kalibrierung
Wählen Sie Hilfsmittel➔ Referenz kalibrieren, um einen Referenzrahmen zu kalibrieren. Es ist möglich, einen Referenzrahmen mit verschiedenen Methoden festzulegen. Im Beispiel der Abbildung wird ein Referenzrahmen durch drei Punkte definiert: Punkt 1 und 2 definieren die Richtung der X-Achse und Punkt 3 definiert die positive Y-Achse.
Hinweis: Weitere Informationen zur Kalibrierung des Referenzrahmens finden Sie im Abschnitt Tipps.