System-Kalibrierung
In diesem Abschnitt erfahren Sie, wie Sie Ihren Roboter und die Sonde kalibrieren. Dieser Schritt muss nur einmal durchgeführt werden, ist aber wichtig, um genaue Ergebnisse zu erzielen.
Bevor Sie mit der Kalibrierung beginnen, empfiehlt es sich, die 3D-Modelle Ihrer Zelle zu laden. Dies wird Ihnen helfen, Kollisionen während der Kalibrierung automatisch zu vermeiden. Wenn Sie nicht über die 3D-Modelle der einzelnen Komponenten verfügen, können Sie einfach ebene Kästen und Kugeln laden, um die Bereiche darzustellen, auf die Sie nicht zugreifen möchten.
Roboter-Kalibrierung
Dieser Abschnitt beschreibt, wie Sie Ihren Roboter mit RoboDK TwinTrack und Ihrem Messsystem automatisch kalibrieren. Mit der Roboterkalibrierung können Sie die Genauigkeit des Roboters auf bis zu 0,150 mm verbessern, wenn Sie Programme offline oder mit den TwinTrack Teach-by-Demonstrationswerkzeugen in RoboDK erstellen (der Grad der Genauigkeit hängt stark von der Qualität und Größe des Roboters ab).
Es wird empfohlen, die Roboterkalibrierung durchzuführen, nachdem Sie Ihre Roboterzelle gebaut oder größere Änderungen vorgenommen haben (z. B. Änderung der Nutzlast Ihres Werkzeugs). Dies hilft Ihnen, die beste Genauigkeit zu erzielen.
Bevor Sie mit der Kalibrierung beginnen, können Sie Ihre Zelle in RoboDK modellieren, um Kollisionen automatisch zu vermeiden. Sie können grundlegende Geometrien wie Ebenen oder Würfel verwenden, um unerwünschte Bereiche zu vermeiden. Sie können auch den Gelenkbereich des Roboters begrenzen.
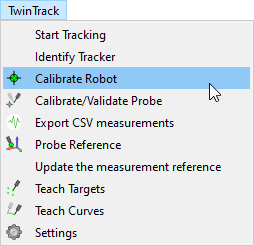
Sie können TwinTrack➔ Roboter kalibrieren auswählen, um die Roboterkalibrierung zu starten.
Dieser Vorgang leitet Sie bei der Kalibrierung des Roboters an, einschließlich der automatischen Erzeugung von Punkten für die Kalibrierung und Validierung. RoboDK kann automatisch Punkte erzeugen, die für den Tracker sichtbar sind.
Für die Kalibrierung des Roboters sind etwa 200 Messungen erforderlich. Die Prozedur beginnt mit einigen Messungen rund um die Ausgangsposition des Roboters
Sobald die Einrichtung fertig ist und die Kommunikation mit dem Roboter ordnungsgemäß hergestellt ist, sollte der Kalibrierungsvorgang 15-30 Minuten dauern.
Das System benötigt keine speziellen Vorrichtungen oder Zubehörteile, es verfolgt einfach die Position des Werkzeugs in Bezug auf die Tracker-Referenz.
Es ist in Ordnung, wenn Sie einige Messungen verpassen, weil die Ziele nicht sichtbar sind.
Hinweis: Weitere Einzelheiten zur Kalibrierung Ihres Roboters zur Roboterkalibrierungfinden Sie in der Anleitung .
Sonden-Kalibrierung
Es ist wichtig, die Spitze Ihrer Sonde richtig zu kalibrieren und sicherzustellen, dass sie innerhalb der gewünschten Toleranzen genau ist.
Die Kalibrierung der Sondenspitze erfolgt durch Bewegen der Spitze um einen statischen Punkt.
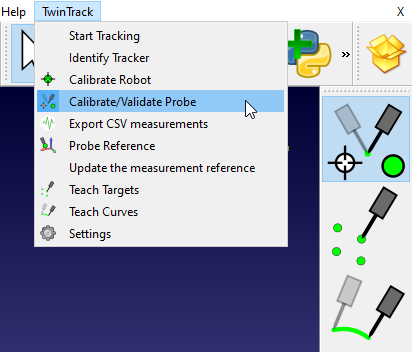
Wählen Sie TwinTrack➔ Calibrate/Validate Probe Tip, um die Werkzeugkalibrierung zu starten.
Da wir in diesem Fall die Creaform HandyProbe verwenden, können Sie die Sonde mit der Creaform VXElements Software kalibrieren und mit RoboDK validieren.
Um die Spitze Ihres Messtasters zu überprüfen, müssen Sie lediglich einen statischen Punkt umfahren und RoboDK zeigt die Genauigkeit an.
Hinweis: Einige Messtaster wie die Creaform HandPROBE oder die Leica T-Probe verfügen über einen virtuellen Taster an der Spitze des Werkzeugs und müssen nicht kalibriert werden.
Offline programmieren
Sie können die Teach-by-Demo-Funktionen auch ohne einen echten Roboter nutzen. Das bedeutet, dass Sie Ihren Roboter nur offline mit Ihrem Messsystem simulieren und programmieren können, bevor Sie Zugriff auf den echten Roboter haben.
Sie benötigen lediglich ein Teil mit einem genau definierten Koordinatensystem, das Sie als Referenz verwenden können.
Sobald Sie das Messsystem und Ihr Teil fertig haben, können Sie die folgenden Schritte ausführen, um das Koordinatensystem Ihres Messgeräts zu definieren:
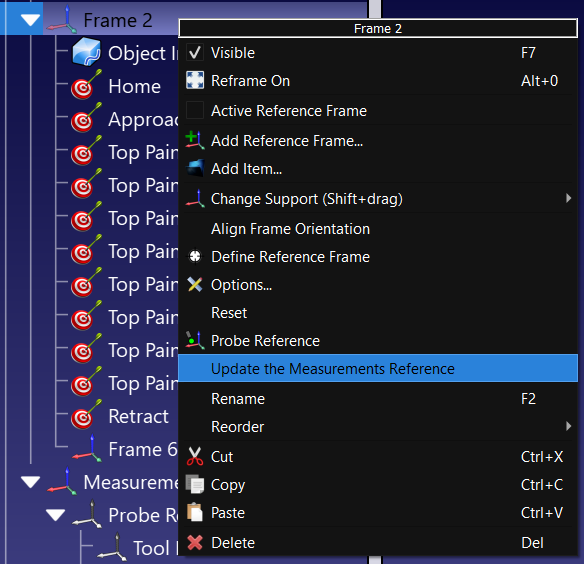
1.Klicken Sie mit der rechten Maustaste auf das Koordinatensystem Ihres Teils (oder das Koordinatensystem der Vorrichtung, an der es befestigt ist).
2.Wählen Sie Referenz der Messungen aktualisieren.
3.Folgen Sie den Anweisungen auf dem Bildschirm, um 3 Punkte zu lernen, die das Koordinatensystem definieren: den Ursprung, einen Punkt auf X+ und einen Punkt auf Y+.
Das Maßsystem wird entsprechend aktualisiert, und Sie können mit dem Einlernen von Punkten, Kurven oder anderen Koordinatensystemen fortfahren.