Align robot references
This section explains how two or more robots can be programmed offline while sharing a common reference frame.
In a typical offline programming application, the position of the object is updated with respect to the robot. However, when two or more robots are used for the same application, the position of each robot must be updated with respect to one common reference (a reference object or a common reference frame).
Follow these steps to update the position of two or more robots with respect to a reference frame:
1.Make sure the robot reference frames and the object reference frame do not depend on each other. If there is a dependency we should place the reference frames attached to the station item.
2.Add a new reference frame attached to each of the robot base frames as if you were going to define a new individual reference frame for each robot (Real Ref. A and Real Ref. B).
This reference frame will represent the real location of the part with respect to each robot.
3.Calibrate each of these reference frames (Real Ref. A and Real Ref. B), separately, using the standard Reference Calibration procedure (3-point method for example)
At this point we will see 3 reference frames that should be coincident, but they are not. The reference frame of each robot must be updated to fix this issue:
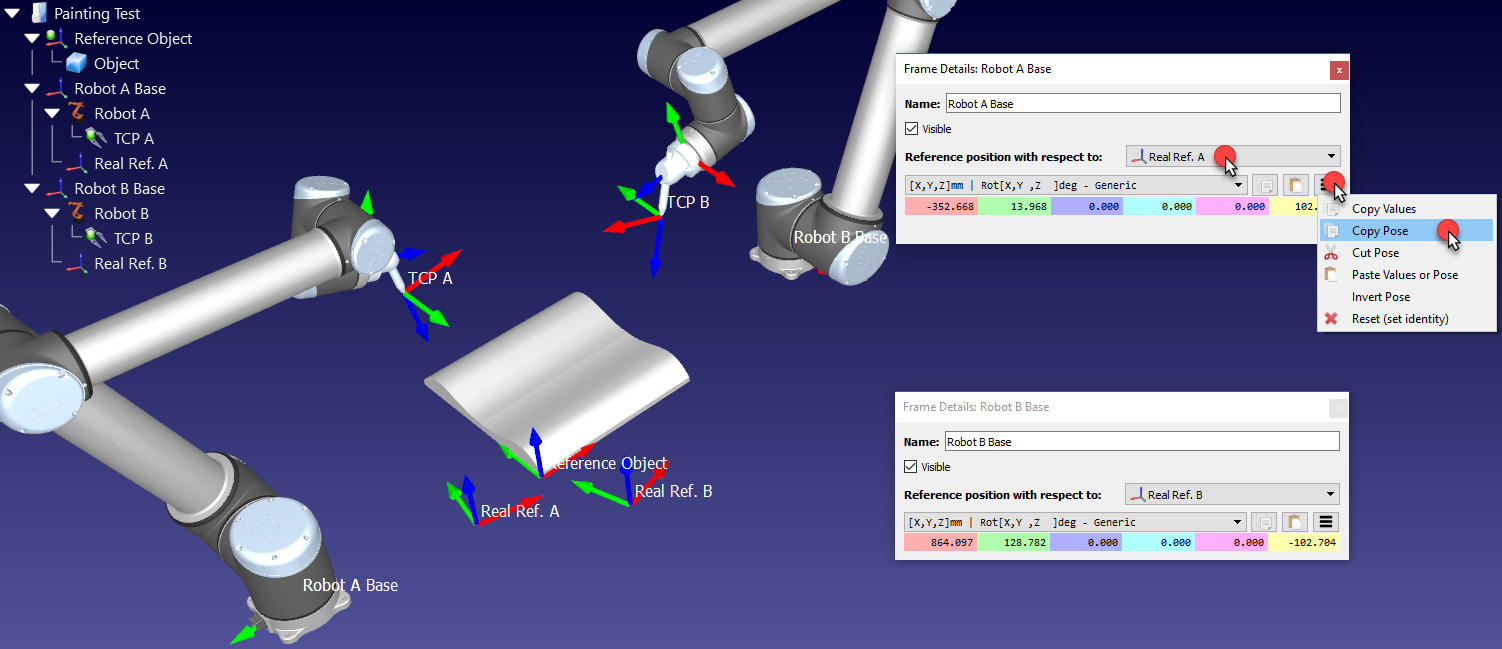
4.Double click one of the robot references, such as Robot A Base to open the reference frame window
5.Copy the position of the robot base reference with respect to the calibrated reference of that robot (Real Ref. A), by selecting the copy button
6.In the same window, change the Reference position with respect to (dropdown) to the Reference Object
7.Paste the copied position. The robot will be moved and the Real Ref. A will be coincident with the Reference Object frame
8.Repeat steps 4-7 of this procedure for the other robots, if any
At the end of this procedure all reference frames should match and the relationship between all the calibrated references and the Reference Object should be the same.