Add a Retract Program
You can easily create a new program that safely retracts the robot from the part to a safe position.
Similar to the previous operations:
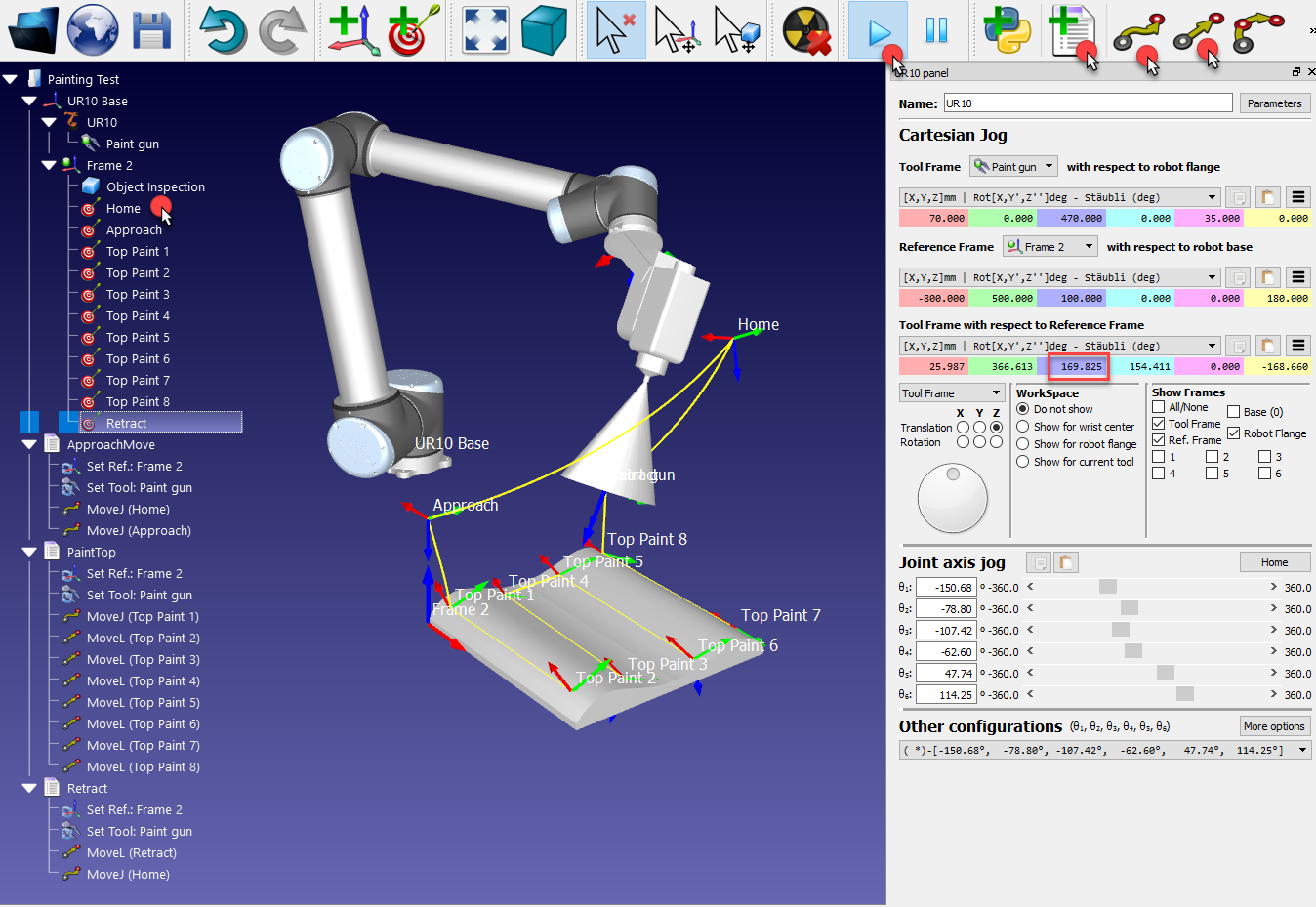
1.With the robot placed at the last target, move the robot upwards by increasing the Z coordinate of the TCP with respect to the reference frame in the robot panel (highlighted case in the next image).
2.Select Program➔
3.Select Program➔

4.Select the Home target
5.Select Program➔
Simulate each program individually by double clicking it. The simulation can be accelerated by holding the Spacebar key or selecting the Fast Simulation button