Import 3D objects
RoboDK supports most standard 3D formats such as STL, STEP (or STP) and IGES (or IGS) formats. Other formats such as VRML, 3DS or OBJ are also supported (STEP and IGES are not supported on Mac and Linux versions).
Follow these steps to load a new 3D file:
1.Select File➔
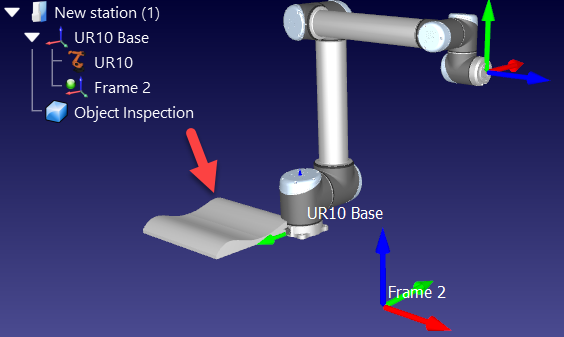
2.Select the object Object Inspection available in RoboDK’s default library:
C:/RoboDK/Library/Object Inspection.
3.Alternatively, drag & drop files into RoboDK’s main window to import them automatically
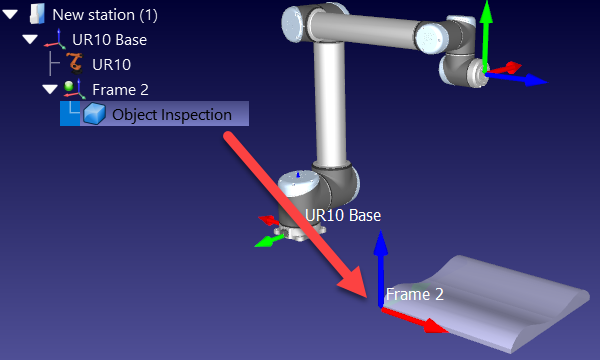
4.Drag & drop the object to the reference frame Frame 2 (inside the station tree)
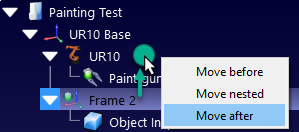
Tip: Drag & drop the object by holding the right click to reorder items inside the tree.
Video: How to import objects and create tools: https://www.youtube.com/watch?v=gNgCwwpZrWE&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=4.
Important: It is important to place the object nested in the reference frame to teach the targets with respect to the object. Then, if the reference frame is moved the targets are moved together with the object.
Tip: For large STEP or IGES files it is possible to accelerate import speed by selecting:
Tools➔Options➔CAD➔Fast import settings. More information available in the STEP/IGES section.
Tools➔Options➔CAD➔Fast import settings. More information available in the STEP/IGES section.
Tip: Although objects can be moved with respect to the reference frame they are attached to (by double clicking the object and entering the coordinates), it is recommended to maintain them always with respect to the given reference frame and move the reference frame instead. This allows matching the object reference properly by just updating the reference frame from/to the robot controller.