Reference Frame
Double click a Reference Frame 
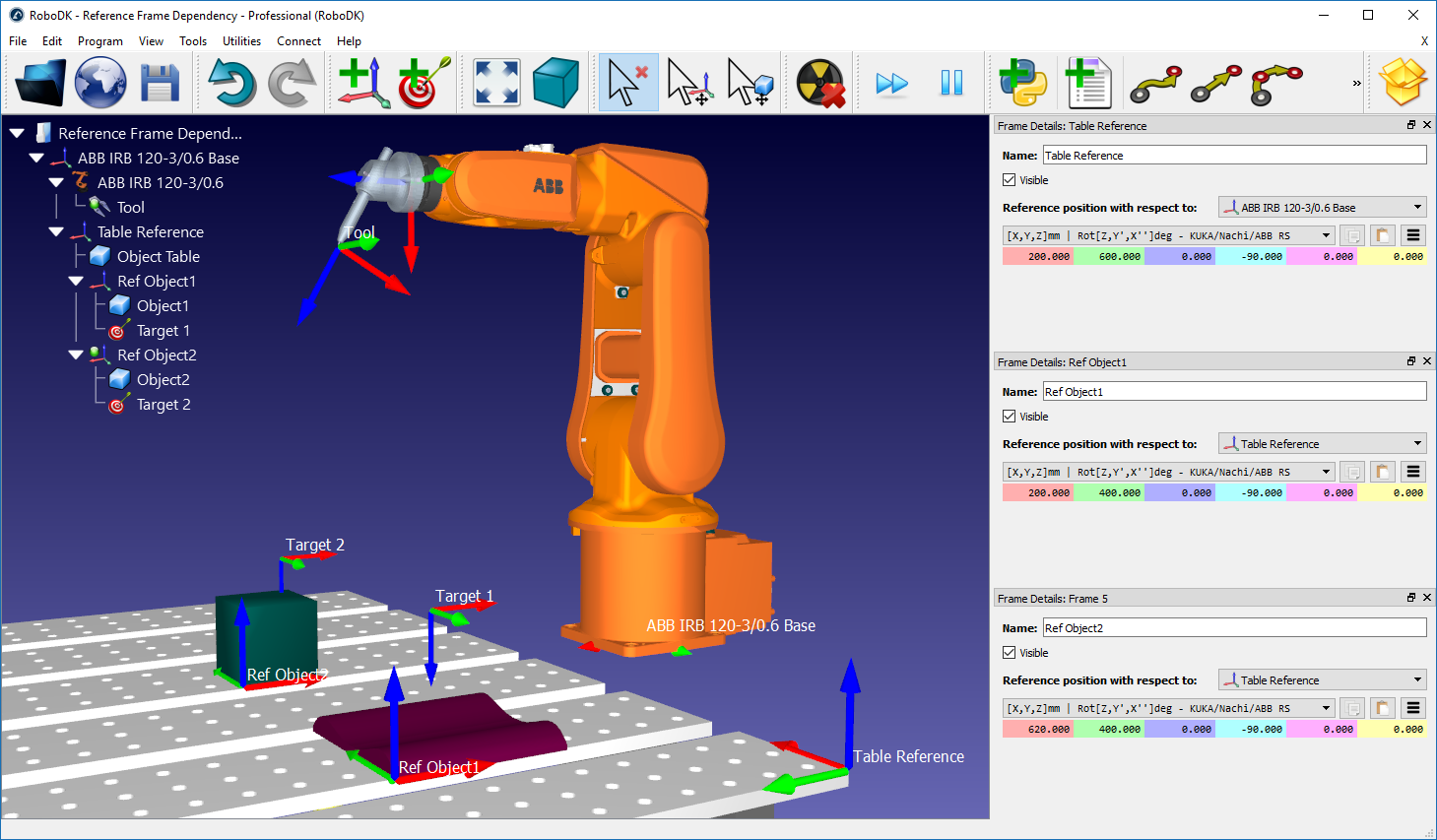
Multiple reference frames can be related to each other to build the dependency that exists in a real application. For example, a table can have a specific position with respect to the robot. Then, two or more objects in the table can have a specific position with respect to the table reference. Moving the table reference will not alter the relationship between the objects and the table but will alter the relationship of all the objects with respect to the robot. The following image shows such an example.