General tab
The main tab contains general options such as customizing your theme, 3D mouse navigation settings, the appearance of the tree, activate automatic backups or customize the decimal places displayed in the forms.
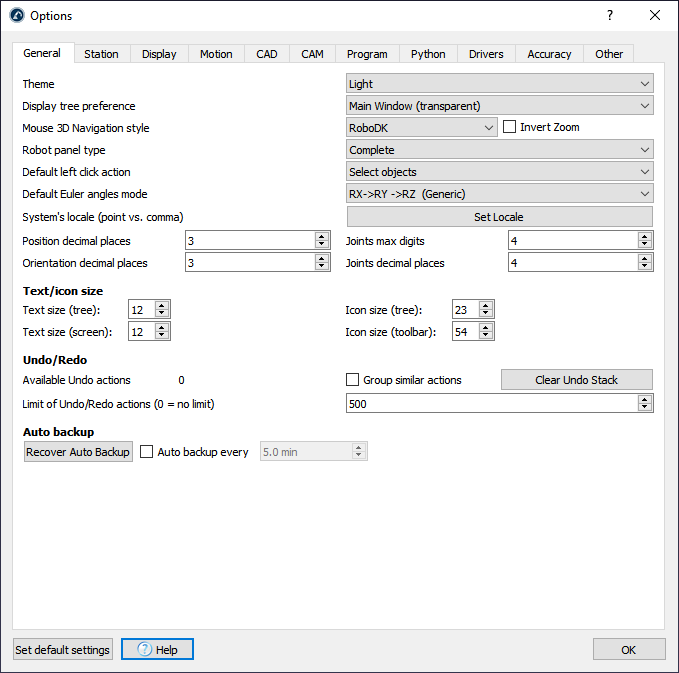
The Theme will allow you to display RoboDK in dark mode, light mode or other color modes used by default by your PC.
The default setting for Display tree preference will display the station tree inside the main window. Change it to Side Window to display the tree as a separate window.
With the Mouse 3D Navigation style, it is possible to specify the preferred type of 3D navigation with a mouse and emulate specific software, such as Rhinoceros, Catia, TopSolid or Vero software.
The Robot panel type is set to Complete by default. This will display a complete robot panel. Set this option to Normal or Basic to reduce the number of options available in the robot panel.
The Default left click action is set to select objects by default. It is possible to change it to other 3D navigation settings, for example, to rotate by default.
The Default Euler angles mode allows selecting the order in which frame rotations are done by default. A generic reference frame contains position and orientation information. Reference frames are poses and they can be represented using XYZ position and rotations around X, Y and Z. The order of rotation is very important. RoboDK will pre-select the right format/order depending on the robot that is used. See the reference frames section for more information.
System’s Locale allows setting the locale to a specific language and country. This will display the numbers in the right format and use the appropriate decimal point character.
The Position/Orientation decimal places and the Joints decimal places allow you to specify how many digits/decimals are displayed before the decimal point and after the decimal point respectively, for robot Cartesian targets and joint targets respectively.
The Text/icon size section allows changing the size of the text and icons in the tree and the toolbar.
You can Clear the Undo Stack to clear the RAM memory. It is also possible to limit the Undo/Redo actions that will be kept in memory. If RoboDK uses a lot of RAM memory or slows down it could be because there is a lot of undo actions being stored. By default, similar actions are not grouped together, for example, if a reference frame is moved, every small step will be recorded. Check Bundle similar actions together to prevent this behavior.