Motion tab
The motion tab allows you to customize the behavior of robot simulations and the tolerances used by RoboDK to display or prevent robot singularities and collisions.
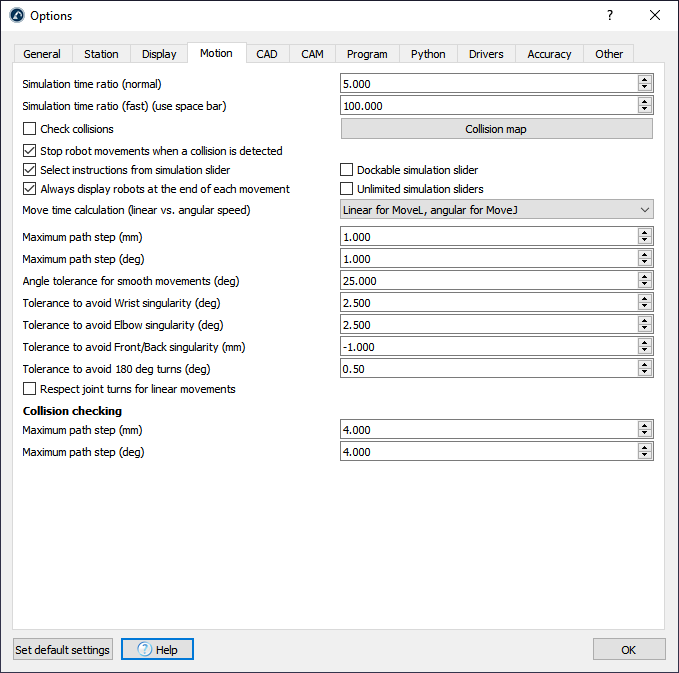
The Simulation time ratio defines how fast the simulation happens with respect to the real time. A default simulation ratio of 5 means that 1 second spent on the simulator equals to 5 seconds in real time running on the robot. More information available in the Simulation ratio section.

Check collisions and the Collision map menu allow activating/deactivating collision checking. These settings can also be changed from the tool bar or the Tools menu. By default, all programs and moving robots will be stopped if a collision is detected, uncheck Stop robot movements when a collision is detected to avoid this behavior. More information about collision map settings in the Collision tips section.
Move time calculation defines how RoboDK calculates the cycle time and how the robots use the linear/angular speeds/accelerations for simulation and timing. More information available in the Cycle Time section.
If the simulation ratio is too fast the computer might not be able to display the robot at the end of each path to keep a fast simulation. To avoid this effect: check Always display robots at the end of each movement.
The Maximum path step (mm/deg) defines how RoboDK discretizes any linear and joint movements respectively for simulation purposes.
The Tolerance to avoid Wrist singularity (deg) is the threshold angle to avoid singularity for joint 5 (deg) so it stays away from 0 deg (or when axis 4 and axis 6 are parallel). This setting applies to most 6-axis robot arms, including collaborative robots. If a singularity is detected for a robot program, the program must be changed to make sure it runs free of singularities. Lowering these tolerances will allow you to be more permissive with RoboDK but you may experience singularity warnings or errors with your real robot controller.
A similar setting is applicable to prevent the Elbow singularity (in deg) and the Front/Back singularity (in mm).